一種差速驅動小車曲線行走方法

摘要:為了讓電磁屏蔽效能自動測試裝置能夠在屏蔽室中按照已給定的路徑運動,設計了一種開環控制的兩輪差速驅動小車,對其運動學進行了分析,并采用雙圓弧擬合曲線方法使小車實現按照給定曲線行走。通過大量運動實驗驗證,利用該方法控制小車能保證小車在行進3 m范圍內橫向和縱向的偏差小于30 mm,可以滿足系統的需要。最后根據實驗結果給出了該方法的適用范圍,以及進一步減少誤差的思路。
關鍵詞:差速驅動;運動控制;固定路徑;曲線行走
0 引言
自動導引車(Automated Guided Vehicle,AGV)是一種可以移動的具有一定智能的自主或半自主工作的機器人,在現代物流倉儲、柔性制造、軍事領域和危險環境下的作業等方面具有廣闊的應用前景。
有很多學者對自動導引車的導引及控制方式進行了研究,大多數采用編碼器、陀螺儀、測距傳感器等對機器人進行位姿檢測、路徑跟蹤,進而對運動進行閉環控制,然而在一些對電磁干擾要求較高或者周圍環境復雜的特殊場合有一定的局限性。
本文設計的兩輪差速驅動小車作為電磁屏蔽效能自動測試裝置的移動平臺來使用。由于系統對測試裝置電磁兼容要求較高,并且由于屏蔽室內存在大量錐形吸波材料、波導窗、波導管等造成測試環境相對復雜,因而提出一種車身不裝傳感器的差速驅動輪式小車結構,并且能在一定精度范圍內進行曲線運動,在低成本、電磁兼容要求高及復雜環境中具有較大的應用空間。
1 小車驅動方式設計
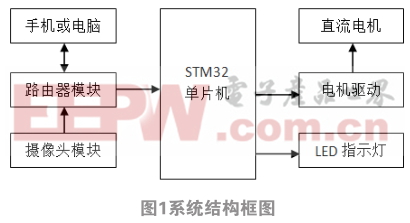
兩輪差速驅動小車常采用的幾種驅動方式示意圖如圖1所示,圖中有剖面線的長方形表示由電機控制的驅動輪,小圓圈表示全向自由輪或球形輪,主要起輔助支撐作用。其中圖1(a)為三輪式差速驅動,圖1(b),圖1(c)為帶有附加接觸點的四輪式差速驅動。圖1(d)為六輪式差速驅動。
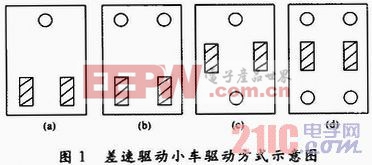
本設計選用方案(c),這個方案的優點是小車旋轉半徑理論上可以從0到無限大,可以原地回轉,運動靈活性好,同時四輪結構相對三輪結構具有較大的承載能力和較好的平穩性。缺點是由于四點著地,如果地面不夠平整,有可能會出現驅動輪被架空的情況,導致小車無法正常運動。為了保證四個輪子與地面的可靠接觸,在前后支撐輪增加了緩沖機構。
差速驅動小車作為電磁屏蔽效能自動測試裝置的移動平臺,測試裝置對小車定位精度要求較高,而對于運動速度要求不高。步進電動機的角位移量與脈沖數成正比,轉速與脈沖頻率成正比,能迅速啟動、反轉、制動,停止時能鎖死。因此驅動電機選用步進電機。
步進電機的輸出經過減速器傳遞,減速器輸出軸通過聯軸器連接到小車的驅動輪上,小車平臺與驅動輪通過滾珠軸承連接。步進電機選用42BY250C二相混合式步進電機,額定靜轉矩為0.54 N·m,配套驅動器為SH-20403型步進電機驅動器,減速器選用減速比為9的PS40003型行星齒輪減速器。
2 運動學分析及建模
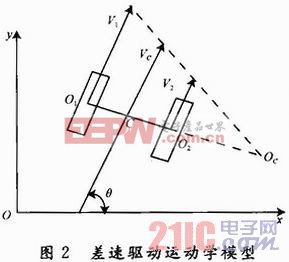
圖2是兩輪差速轉向AGV的結構示意圖(圖中僅畫出兩個驅動輪)。O1,O2分別是左、右驅動輪的輪心,輪間距O1O2為l,C為O1O2的中心。xOy為大地坐標系,V1,V2及VC分別為左、右驅動輪及車體中心C點的速度。假設C在大地坐標系中的坐標為(x,y),則AGV的姿態角用VC與x軸的夾角θ(規定逆時針時為正)表示,則向量(x,y,θ)表示AGV在大地坐標系xOy中的位姿。












評論