一種差速驅動小車曲線行走方法

(2)所需擬合的曲線段內有拐點
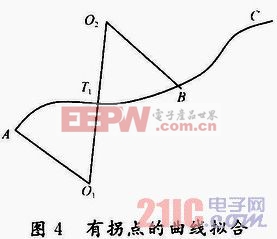
根據式(6)計算出的理論曲線在相鄰兩節點處的曲率半徑異號,則表明理論曲線在這兩點處的曲率方向相反,此時曲線出現拐點,如圖4所示。本文引用地址:http://www.j9360.com/article/160260.htm
這種情況只需要將第③個要求改為如下關系式:
![]()
就可以和第一種情況一樣,通過計算得到擬合圓弧的圓心坐標。
4 實驗及結果分析
在實驗中,設給定曲線為y=100(x/500+sin(x/500)),x,y的單位為mm,這里設定△x=100 cm,小車從原點處開始運動,通過多次實驗,對小車運動到固定的幾個點進行測量,對這些點的坐標取平均,近似繪制出實驗結果,如圖5所示。
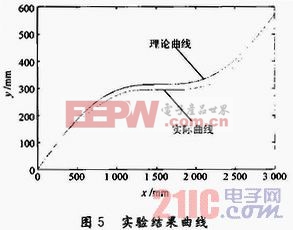
圖5中,上方的曲線為理論曲線,下方的曲線為實際行走曲線。可以看出,在小車行進過程中,實際軌跡與理論曲線的偏差不超過30 mm。在實際使用中,基本可以滿足給定的30 mm以內的誤差要求。
通過對不同給定曲線的實驗,發現在曲線的曲率半徑小于10 m,并且曲線的變化速率不劇烈的情況下,運動的精度都能得到較好的保證。
由于車輪的轉動頻率是由單片機產生的,V1和V2是不能連續變化的,所以當曲線的曲率半徑越大時,V1和V2的調節范圍越小,因而誤差會變得很大。這種誤差可以通過提高單片機晶振的頻率來減小,但不能消除。在實際情況下,可以根據所需要的最大擬合圓弧半徑和精度來選擇滿足要求的晶振。
5 結語
本文根據電磁屏蔽室自動測試裝置移動平臺的需求,設計了一種差速驅動小車,并介紹了小車的驅動結構、運動學模型、曲線行走算法等,最后對曲線運動進行了實驗驗證。小車的控制系統為開環控制方式,不能自動修正路徑偏差。但由于控制系統結構簡單,小車結構容易實現,在一些對電磁干擾要求較高的場合以及由直線、圓弧及不復雜曲線構成的固定路徑的機器人領域有著一定的應用前景。












評論