- 1? ?項目目的及實現功能一般在弱電領域,對單片機學習和使用的通用路線就是使用開發板進行調試,但是開發板有的大多是一些板載零件,沒有相應的執行機構。然而我們電子工程師常常需要一些執行機構進行調試/ 分析/ 驗證圍繞單片機的設計方案;小車(vehicle) 作為科研工程中一個常見的機電一體化執行機構模型,其包含了運動學和動力學兩個領域的物理和數學知識,所以摸索使用一款新單片機時,可選一個小車做工程實踐平臺,特點如下:①能評估選型一款MCU 硬件外設資源(如定時器PWM,ADC,I2C,S
- 關鍵字:
202501 MSPM0G3507 MSPM0 智能小車 小車
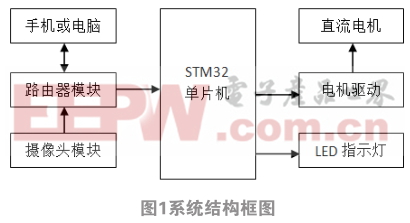
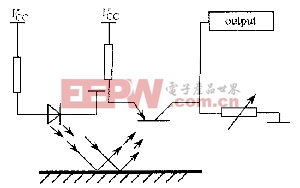
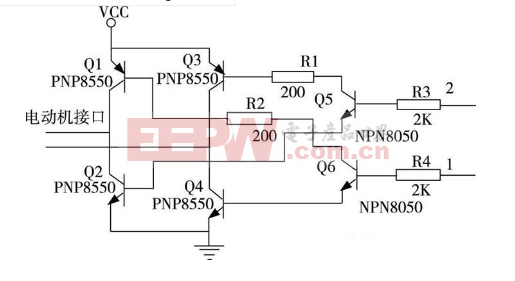
- 梁?妍,張天一(鄭州工商學院,鄭州?450000) 摘?要:本文是對Wi-Fi智能電動小車的設計,采用硬件和軟件結合的方式實現,主要由控制模塊、Wi-Fi信號模塊、驅動模塊、攝像模塊等多個模塊組成。攝像模塊獲取的視頻或圖片信息可以通過Wi-Fi信號傳送給手機或電腦PC機,而手機或電腦PC端也可以通過Wi-Fi發送指令給控制模塊,從而控制驅動模塊來驅使小車動作,最終實現實時監控及精確控制小車運行的目的。 關鍵詞:Wi-Fi;智能控制;驅動模塊;小車 0 引言 目前在學生電子設計競賽中,有關智能電
- 關鍵字:
201910 Wi-Fi 智能控制 驅動模塊 小車
- 摘要 采用特定頻率的聲音信號作為聲源對小車進行導航,使小車能夠通過接收和處理聲信號以確定聲源方向和位置,并行進至聲源處的功能。其中,用硬件濾波電路對聲信號進行濾波處理,由FPGA計算聲信號到達的時間差,單片
- 關鍵字:
研究 小車 自行 導航

- 摘要 當人們無法在一些危險場所進行現場作業或控制時,智能小車可得到應用。近年來,雙音多頻信號技術使撥號速率提高,并應用在交互式控制中,更可組成有線或無線的通信系統。考慮到項目要求的實時遠程控制和成本等因
- 關鍵字:
小車 設計 控制 信號 GSM 雙音多 基于
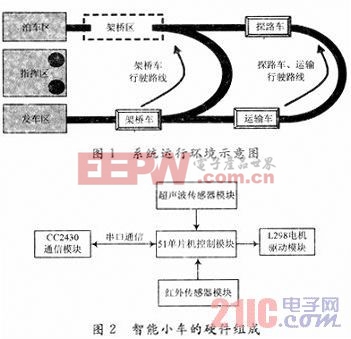
- 摘要:針對高職院校物聯網應用技術專業實訓問題,基于MCS-51及CC2430單片機、紅外及超聲波傳感器,設計了一套基于TI Z-STACK協議棧的智能小車調度系統。分析了無線網的組建流程及軟件實現方法。
關鍵詞:Z-STACK協議
- 關鍵字:
調度 系統 設計 小車 智能 TI Z-STACK 基于
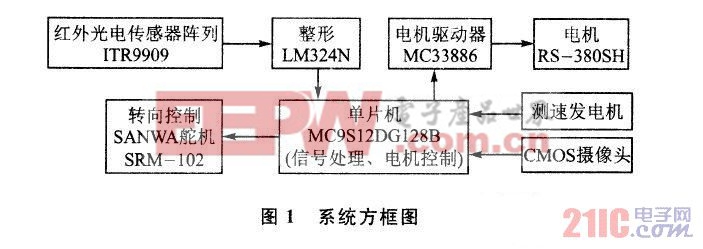
- 描述:我們設計的智能尋徑小車主要由路徑檢測、轉向控制、電機驅動、車速檢測和電擁管理等 功能模塊以及軟件控制算法組成。小車以飛思卡爾公司的16位單片機MC9S12DG128B 為 核心控制器,根據黑色與白色反射率的不同.
- 關鍵字:
小車 設計 自動 傳感器 CMOS 紅外 基于
- 摘 要: 介紹了一種基于SPCE061A 的智能音控小車機器人的設計過程, 給出了智能小車的硬件構成。從軟件設計的角度闡述了小車使用語音辨識和中斷技術的智能控制算法, 并詳細說明了語音辨識技術在智能小車上的實現過程
- 關鍵字:
機器人 設計 小車 智能 SPCE061A 基于
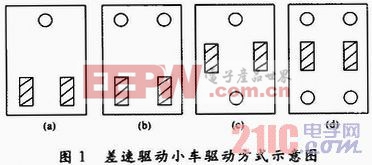
- 摘要:為了讓電磁屏蔽效能自動測試裝置能夠在屏蔽室中按照已給定的路徑運動,設計了一種開環控制的兩輪差速驅動小車,對其運動學進行了分析,并采用雙圓弧擬合曲線方法使小車實現按照給定曲線行走。通過大量運動實驗
- 關鍵字:
方法 行走 曲線 小車 驅動
- 0 引言 輪式小車是智能小車機械結構的主體部分,由車身、輪子、速度傳感器、轉動軸等結構部件構成。還包括提供動力的驅動器,采集環境信息的攝像頭等模塊,綜合實現收集小車的自身狀態信息或外部環境信息,并對傳
- 關鍵字:
小車 方案設計 智能 算法 PID 控制 采用
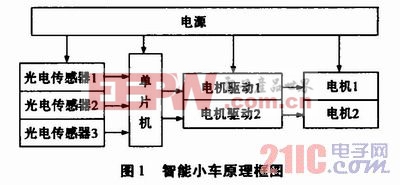
- 摘要:介紹了一種智能尋跡小車的設計與實現。基于紅外反射式光電傳感器的尋跡原理,采用AT89C52單片機為核心控制器件,通過紅外傳感器檢測路面信息,單片機獲取路面信息后,進行分析、處理,最后控制步進電機調節轉向
- 關鍵字:
智能 小車 傳感器 光電 紅外 反射 基于
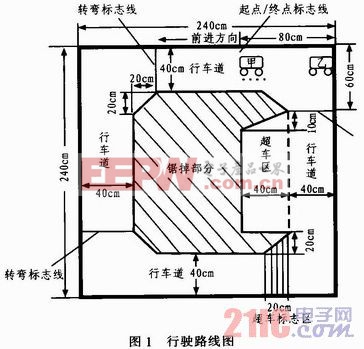
- 摘要:文中采用MSP430F149作為主控芯片,由超聲測距模塊、轉彎線檢測模塊、自動糾偏檢測模塊、電機驅動模塊等構成小車。主要對行駛過程中3種情況提出了3種算法,分別是直道二次糾偏算法、彎道糾偏算法和超車算法。實
- 關鍵字:
實現 糾偏 自動 小車 智能
- 小車參數:控制鍵5個:前進、后退、左轉、右轉、停止;有效距離200米;速度: 我想遙控小車大家都玩過,網上也有各種DIY小車的制作詳解,我做的這個遙控小車和其他的作品大同小異,但作為單片機設計,這次設計我主
- 關鍵字:
制作 詳解 小車 遙控 無線 單片機
- 摘要:介紹一種基于MSP430F2274單片機為核心的智能小車。小車采用超聲波測距技術實現自動避障,同時通過語音模塊來播報出小車與障礙物的距離。為了使測距不受溫度影響,用溫度傳感器實時檢測小車周圍環境的溫度并修正
- 關鍵字:
設計 小車 智能 MSP430 基于
- 實現汽車智能化的技術非常多, 本文利用目前比較熱門的技術語音控制技術, 實現小車自動前進、后退、左拐、右拐等, 當然所設計的小車只是智能汽車的微模型, 還處于模擬演示階段, 要真正實現智能汽車為人服務還有很
- 關鍵字:
方案 設計 機器人 小車 智能

- 無線智能小車控制系統,實物照片:概要:本系統由上位機控制軟件,無線串口收發模塊,子機控制主板,子機機械執行部分等構成。由上位機(電腦)控制軟件或人作出決策,把命令通過串口傳給半雙工無線串口通訊模塊發射,又由子機的無線通訊模
- 關鍵字:
控制系統 小車 智能 無線
小車介紹
您好,目前還沒有人創建詞條小車!
歡迎您創建該詞條,闡述對小車的理解,并與今后在此搜索小車的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473