具有顏色識別功能的類人機器人設計

摘要:針對傳統類人機器人在控制系統實時性和視覺識別方面的不足,以S3C6410作為主控芯片,設計了具有視覺識別功能的類人機器人控制系統,通過改進和簡化視頻識別算法取得了良好的目標識別效果。實驗表明,基于本控制系統設計而成的類人機器人實時性好,目標識別準確,通過調整運動路徑能夠快速找到目標。
關鍵詞:類人機器人;嵌入式實時操作系統;機器視覺;顏色識別
引言
智能移動機器人是近年來發展起來的一門綜合學科,涉及機械設計、傳感檢測、人工智能等多方面知識。類人機器人的控制系統分為三個層次:最上層是機器人的策略規劃層,利用各種算法實現各部分的功能;中間一層運行各類應用程序的嵌入式實時操作系統;最底層是硬件平臺,通過外圍接口獲得各類數據、信息。
自主機器人利用傳感器獲取的信息控制機器人的動作。本文根據武術擂臺機器人的實際需要,設計了機器人的控制系統,實現攝像頭圖像采集、處理和舵機控制等功能。
策略規劃層中,由于圖像信息具有信息豐富、對場景描述完全的特點,主要通過處理攝像頭采集的圖像信息實現顏色目標定位。這里采用Linux嵌入式操作系統,由于嵌入式系統資源的限制,要求目標識別算法運行效率高,占用內存空間小。硬件平臺主要是控制舵機實現機器人的運動控制。
1 系統控制電路與視頻識別算法
1.1 機器人整體架構
在武術擂臺技術挑戰賽中,機器人要采集目標的位置信息。由于I/O、A/D轉換的有效檢測距離有限,機器人采用攝像頭采集場地上的圖像信息,根據目標的顏色進行識別、定位。當檢測到目標位置以后控制舵機自主運動向目標靠攏,完成自我介紹、抱繡球等動作。所設計的機器人外形如圖1所示。
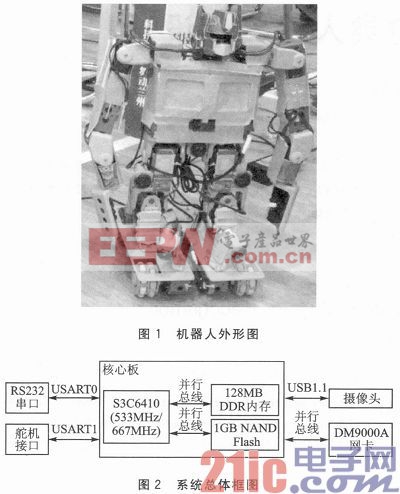
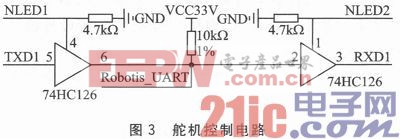
從圖中可以看出,機器人頭部采用攝像頭,通過USB接口與主控板進行連接,用于采集圖像信息。機器人腰部、腿部、胳膊各關節利用舵機使其具有一定的自由度,用到的舵機為CDS系列數字舵機。它內部有ATmega8芯片,主控板通過串口與ATmega8通信,就可以實現舵機的控制。針對以上要求,同時考慮系統的實時性,采用S3C6410作為主控芯片。實際控制系統總體框圖如圖2所示。
1.2 舵機控制系統設計
主控板通過串口1完成與舵機之間的數據通信,舵機控制電路的原理圖如圖3所示。
由于半雙工數據線只有一根,所以必須在電路上實現發送和接收上的分離。這里網絡Robotis_UART一端直接接到舵機的信號線上,而另一端經過74HC126的兩個緩沖器分別與主控芯片的TXD1和RXD1相連,再通過主控芯片使能的方式來確定是發送還是接收數據。主控芯片可以使NLED1為高而NLED2為低,這時TXD1就取得了線路的控制權,主控芯片就可以發送數據到舵機了。反之,當NLED2為高而NLED1為低時,這時RX D1就取得了線路的控制權,這時舵機可以返回數據。






評論