基于DSP2812的運動控制平臺

在大二的時候我加入到了學院的創新實驗室,加入實驗室后每天都很努力,怕學習不好表現不好會被導師趕出去,每天早上7點簽到,然后就開始學習英語,如果有課就在8點去上課,沒課就開始學習相關專業課;晚上必須在實驗室待到10點以后才能回寢室,每個假期只能回家一周多,所以從大二開始我就沒有了寒暑假,這些都是導師的要求,也是工作室每個成員必須做到的。大二導師主要抓模數電和單片機,記得曾經做過OCL模擬功放,數字功放,電源等一些模擬類設計,并以音質和效率進行評比;用單片機做過一些多功能數字鐘,紅外解碼等一些作品,數字鐘以運行一天誰的誤差最小來評比。
本文引用地址:http://www.j9360.com/article/159313.htm到了大三,我們每個人根據自己的興趣愛好選擇了自己的方向,我們實驗室一直以來都是以FPGA為主打方向的,很多人選擇了FPGA,而我卻選擇了DSP,實驗室師兄做DSP的也幾乎沒有,我就成立孤軍奮戰。接下來湊了1000元買了開發板,開始接觸DSP,剛開始的入門真的遇到了很多的問題,總是踏不進那個門檻,一個人的鉆研會浪費更多的時間,但每個問題讓人記憶猶新,如今論壇上很多剛接觸DSP的網友遇到的問題也就是當初我遇到過的。
基本熟悉了DSP2812后我做的第一個設計就是2011年中國機器人大賽項目中的機器人游中國小車,整個車體的硬件單路都是我們自己設計,畫PCB并用學院的PCB刻板機花一夜的時間做出來,焊接調試,可能是由于設計的不合理和保護做的不是很好,燒壞過2塊核心板;第二個設計就是我要快樂分享的運動控制平臺的設計,下面就是我的設計:
設計以TMS320F2812為控制器,結合其控制方便、處理速度快等特點,運用PID算法進行速度環調節,500線光電編碼器進行速度的反饋,變M/T法進行速度的精確采集,霍爾電流傳感器進行電流的采集和繼電器確保過流的斷電保護,可控恒流源控制負載大小,VB6.0可視化控制界面的編寫,設計了兼有PWM和模擬量控制的直流無刷電動機閉環在線調試系統,給出了該系統的功能、硬件結構和軟件設計方法。系統中的主要控制對象是直流無刷電機,還有磁粉制動器作為電機的模擬負載,下面簡單介紹一下直流無刷電機和磁粉制動器:
直流無刷電機利用電子換向器取代了機械電刷和機械換向器,因此使這種電機不僅保留了直流電機的優點,而且又具有交流電機的結果簡單、運行可靠、維護方便等優點,使它一出現就以極快的速度發展和普及,廣泛應用于航空航天,精密儀器,現代家電等領域。磁粉制動器是根據電磁原理和利用磁粉傳遞轉矩的。磁粉制動器具有激磁電流和傳遞轉矩基本成線性關系,作為電機的模擬負載,在調試閉環參數時可以通過調節恒流源的電流大小去控制負載的大小,從而找出最佳閉環系數。
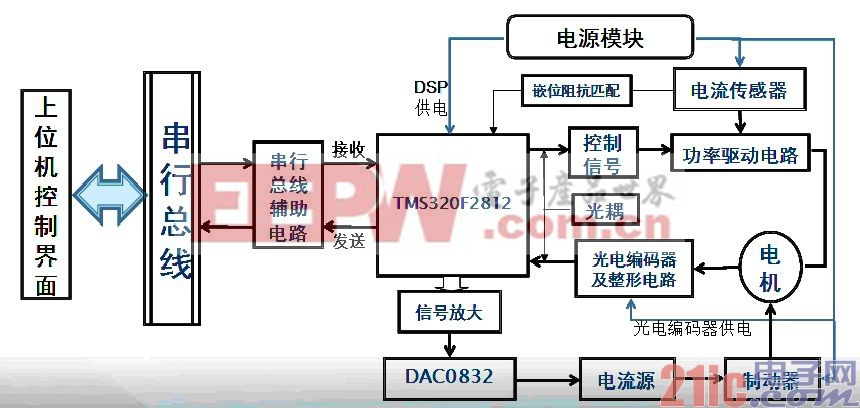
在整個運動控制平臺硬件系統中,系統供電電路主要有DCDC模塊構成,負責給各個電路模塊提供工作電源,其輸出電壓有±15V,+12V,+5V,+3.3V。信號調理電路完成對各種傳感器及采集回來的信號處理,主要包括霍爾電流傳感器的模擬量信號、光電編碼器的轉速信號、給定控制開關量信號等,經調理電路后,使其各種信號的電平和幅值滿足DSP控制器的要求;DSP主控電路以TMS320F2812為核心處理器,完成對各種信號的處理以及系統的閉環控制,并通過SCI接口實現控制器與上位機的通訊;恒流源為磁粉制動器提供電流,以便輸出與電流成線性關系的扭矩。下面是我畫的大體框圖:其中2812核心板原理圖、PCB、BOM表和Gerber都已經分享到了論壇版塊 http://bbs.21ic.com/icview-583101-1-1.html
電機驅動器是由分立元器件H橋搭起來的,沒有采用半橋驅動芯片如IR2101等芯片,使用三極管搭建的并有一定的硬件死區作用;我覺得做H橋驅動器最重要的就是上橋臂的浮動導通,這一點一定要做好,在電機驅動中,由于電流較大,上管都采用N型MOSFET。由于每個上管源極的電壓是浮動的,因此上管的柵極驅動電壓也必須浮置在源極的電壓之上才能有效地開啟上管。實現這種的方法有多種,如自舉法、隔離電壓法、脈沖變壓器法、電荷泵法、載法驅動法等多種方法。本次設計采用電荷泵法來實現電壓的浮動,主要電路如下如所示:
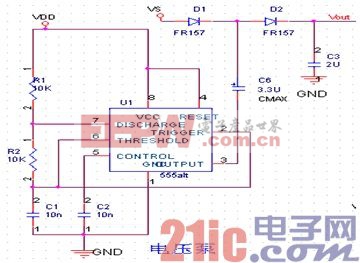
電荷泵的基本原理是通過電容對電荷的積累效應而產生高壓,使電流由低電勢流向高電勢。隨著集成電路的不斷發展,基于低功耗,低成本的考慮,電荷泵在電路設計中的應用越來越廣泛。由于H橋由4個N溝道功率MOSFET組成,如要控制各個MOSFET,各MOSFET的門極電壓必須足夠高于柵極電壓。通常要使MOSFET完全可靠導通,其門極電壓一般在10V以上,即Vgs>10V,對于H橋下橋臂,直接加10V以上的電壓即可使其導通;而對于上橋臂,驅動電路必須能提供高于電源電壓的電壓,這就要求驅動電路中增設升壓電路,提供高于柵極的電壓。考慮到Vgs有上限要求,一般MOSFET導通時Vgs為10V~15V,也就是控制門極電壓隨柵極電壓的變化而變化,即浮動柵驅動。因此在驅動控制電路中設計電荷泵電路,用于提供高于驅動電源電壓的電壓。
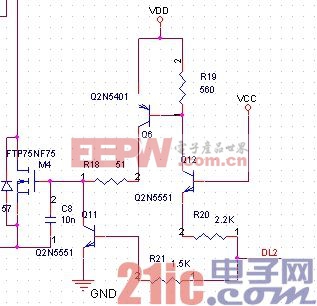
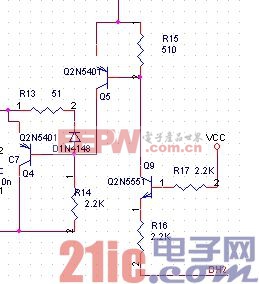
最近看到電動車驅動器上為了擴大電流,在H橋上使用的75NF75上又并聯了一個,這樣電流會更大,可靠性也更高,值得借鑒。下上橋驅動電路如下圖所示:
















評論