Cortex-M3內核芯片LM3S2965的CAN總線節點設計

摘要:根據CAN總線的特性,給出了基于Cortex-M3內核的LM3S2965芯片中CAN總線節點的硬件電路、軟件實現框架及部分代碼。初始化代碼部分可以直接應用在其他CAN總線的接口設計中。
關鍵詞:CAN;Cortex-M3;稱重儀表;現場總線
引言
CAN總線具有通信速率高、可靠性高、連接方便和性能價格比高等諸多特點。CAN(Controller Area Network,控制器局域網)屬于總線式通信網絡,它是一種專門用于工業自動化領域的網絡,不同于以太網等管理和信息處理用網絡,其物理特性及網絡協議特性更強調工業自動化的底層監測及控制。它采用了最新的技術及獨特的設計,可靠性和性能超過了已陳舊的現場通信技術,如RS485、BITBUS等。
多數采用微處理器結合CAN控制器芯片的硬件方案,軟件實現上是對CAN控制器芯片的寄存器編程,比較繁瑣。Luminary Micro公司(現已被TI公司收購)所提供的Stellaris系列是基于ARM Cortex-M3的控制器,它們為對成本尤其敏感的嵌入式微控制器應用方案帶來了高性能的32位運算能力。其中,LM3S2000系列是針對控制器局域網(CAN)應用方案而設計的一組芯片,它在Stellaris系列芯片的基礎上擴展了Bosch CAN網絡技術——短距離工業網絡里的黃金標準。
目前,很多系統需要稱重數據。本文介紹一種利用LM3S2965芯片設計的CAN總線節點的軟硬件方案,可以直接將儀表與傳感器組成的稱重系統接人現有的分布式網絡中。
1 系統硬件設計
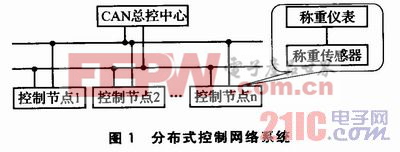
基于CAN總線的分布式控制網絡系統如圖1所示。采用現場總線式集散控制系統(Field Distributed Control Svstem,FDCS)結構,由CAN總控中心、控制節點以及CAN現場控制網絡組成。CAN總控中心主要完成在線系統監控,多個智能節點各自獨立完成數據采集、系統設定、運行顯示控制等,通過CAN現場總線,在操作站和智能節點之間交換各種數據和管理控制信息。圖中的任何一個控制節點都可能是稱重系統,由稱重傳感器和稱重儀表組成。通過這個控制網絡,總控中心就可以監控、操作各個稱重單元的工作狀態。
本文利用TI公司生產的LM3S2965設計了一種CAN總線系統智能節點。節點包括A/D轉換、顯示、按鍵輸入、CAN接口等多個部分,根據系統的要求還可以增加更多的模塊。本文僅介紹CAN接口部分,其硬件電路如圖2所示。該電路主要包括CAN總線收發器SN65HVD1050D、高速光電耦合器6N137以及與微控制器LM3S2965的接口部分。LM3S2965通過內置CAN控制器極大地簡化了硬件設計和軟件編程,加速了實現方案的設計,且穩定可靠性得到保證。
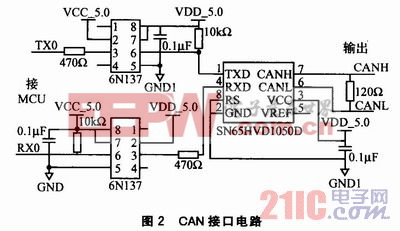
為了增強CAN總線節點的抗干擾能力,LM3S2965的TXO和RXO通過高速光耦6N137與CAN收發器SN65HVD1050D相連,很好地實現了總線上各CAN節點間的電氣隔離。電源的完全隔離可采用小功率電源隔離模塊或帶多5 V隔離輸出的開關電源模塊實現,這些部分雖然增加了節點的復雜程度,但卻提高了節點的穩定性和安全性。6N137光耦合器的使用需要注意兩點:第一,6N137的第6腳輸出電路屬于集電極開路電路,必須接一個上拉電阻;第二,6N137內部的第2腳和第3腳之間是一個LED,必須串接一個限流電阻。








評論