EEPW首頁(yè) >>
主題列表 >>
fuzzy-pid
fuzzy-pid 文章 進(jìn)入fuzzy-pid技術(shù)社區(qū)
基于STM32的遠(yuǎn)程溫控系統(tǒng)設(shè)計(jì)

- 溫度控制是工業(yè)控制的主要對(duì)象之一,常用的溫控?cái)?shù)學(xué)模型是一階慣性加上純滯后環(huán)節(jié),但其隨著加熱對(duì)象和環(huán)境條件的不同,會(huì)存在著較大的差異。因?yàn)闇乜貙?duì)象這種較為普遍的含有純滯后環(huán)節(jié)的特點(diǎn),容易引起系統(tǒng)超調(diào)和持續(xù)的振蕩,溫度控制對(duì)象的參數(shù)會(huì)發(fā)生幅度較大的變化。因此無(wú)法采用傳統(tǒng)的控制方法(如常規(guī)的PID控制)對(duì)溫度進(jìn)行有效的控制,而智能控制不需要對(duì)象的精確數(shù)學(xué)模型就可以對(duì)系統(tǒng)實(shí)施控制。溫度控制多采用由單片機(jī)系統(tǒng)來(lái)實(shí)現(xiàn)溫度控制,其缺點(diǎn)是遠(yuǎn)程控制系統(tǒng)復(fù)雜,可靠性差,特別是當(dāng)控制點(diǎn)較多、距離較遠(yuǎn)時(shí),采取總線方式的通訊出錯(cuò)概
- 關(guān)鍵字: 溫度控制 PID
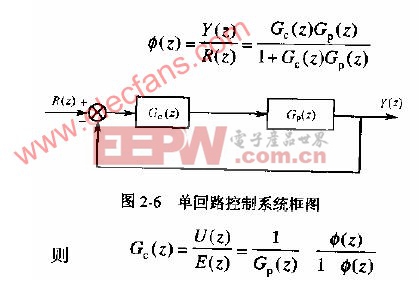
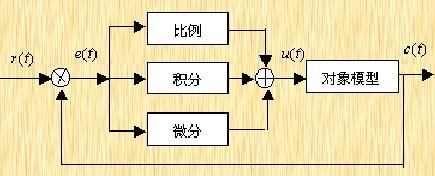
基于Toeplitz方程的改進(jìn)廣義預(yù)測(cè)PID控制
- 引言
PID控制技術(shù)是目前應(yīng)用最廣泛的控制技術(shù),PID控制是一種應(yīng)用歷史悠久、工業(yè)界比較熟悉的簡(jiǎn)單控制算法。自1992年Hagglund提出預(yù)測(cè)PI控制器(Hagglund,1992)的思想以來(lái),預(yù)測(cè)PID算法得到了逐步的發(fā)展和完善, - 關(guān)鍵字: Toeplitz PID 方程 廣義預(yù)測(cè)
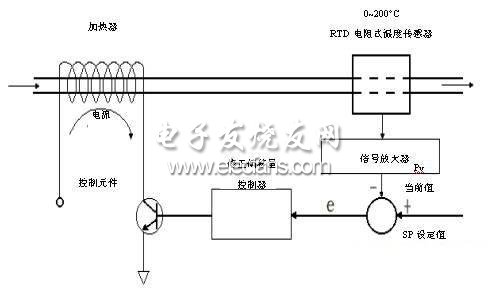
基于單片機(jī)的溫濕度檢測(cè)與控制系統(tǒng)研究
- 摘要:?jiǎn)纹瑱C(jī)在檢測(cè)和控制系統(tǒng)中得到廣泛的應(yīng)用,溫、濕度則是系統(tǒng)常需要測(cè)量、控制和保持的量。文中介紹了一種 ...
- 關(guān)鍵字: 單片機(jī)AT89C51 DS18B20溫度傳感器 檢測(cè)與控制 PID 看門(mén)狗
數(shù)字顯示調(diào)節(jié)儀PID參數(shù)自整定分析
- 各種智能型數(shù)字顯示調(diào)節(jié)儀,一般都具有PID參數(shù)自整定功能。儀表在初次使用時(shí),可通過(guò)自整定確定系統(tǒng)的最佳P、I、D調(diào)節(jié)參數(shù),實(shí)現(xiàn)理想的調(diào)節(jié)控制。在自整定啟動(dòng)前,因?yàn)橄到y(tǒng)在不同設(shè)定值下整定的參數(shù)值不完全相同,應(yīng)
- 關(guān)鍵字: PID 數(shù)字顯示 調(diào)節(jié)儀 參數(shù)
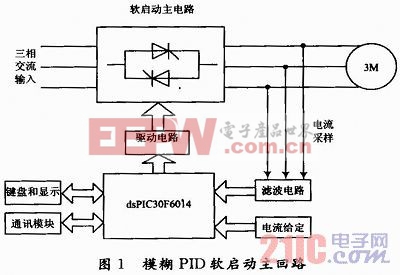
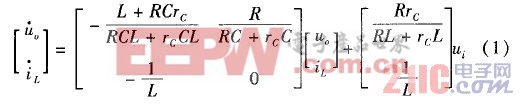
基于ARM與PID算法的開(kāi)關(guān)電源控制系統(tǒng)
- 近年來(lái),嵌入式技術(shù)發(fā)展極為迅速,出現(xiàn)了以單片機(jī)、專(zhuān)用嵌入式ARM為核心的高集成度處理器,并在通信、自動(dòng)化、電力電子等領(lǐng)域得到了廣泛應(yīng)用。電源行業(yè)也開(kāi)始采用內(nèi)部集成資源豐富的嵌入式控制器來(lái)構(gòu)成大型開(kāi)關(guān)電源的
- 關(guān)鍵字: 開(kāi)關(guān)電源 控制系統(tǒng) 算法 PID ARM 基于
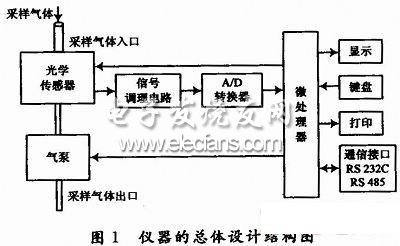
基于PID控制粉塵濃度測(cè)量?jī)x的實(shí)現(xiàn)
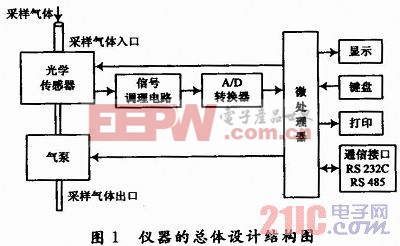
- 摘要:為了擴(kuò)大粉塵測(cè)量?jī)x的測(cè)量范圍,采用一種自適應(yīng)的測(cè)量方法,即根據(jù)被測(cè)環(huán)境粉塵的濃度自動(dòng)調(diào)節(jié)傳感器的接收靈敏度,并結(jié)合相應(yīng)的軟件算法,使高、低濃度的粉塵都能得到有效測(cè)量。在設(shè)計(jì)過(guò)程中運(yùn)用PID算法對(duì)測(cè)量
- 關(guān)鍵字: 測(cè)量?jī)x 實(shí)現(xiàn) 濃度 粉塵 PID 控制 基于
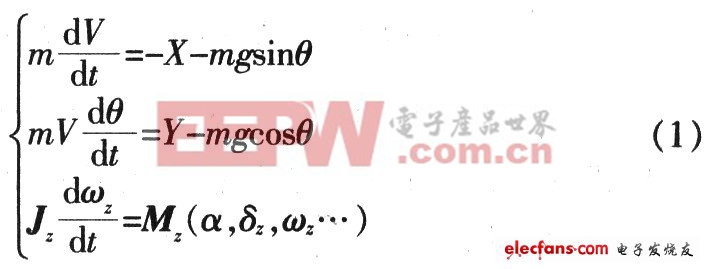
基于虛擬儀器的同步伺服系統(tǒng)PID模糊控制器設(shè)計(jì)
- 1.引言
顫振試飛歷來(lái)是飛機(jī)試飛最后關(guān)注的課題,因?yàn)樗苯佑绊戯w行安全。在顫振試飛實(shí)驗(yàn)中,顫振激勵(lì)系統(tǒng)是顫振試飛的重要設(shè)備之一。
直流伺服系統(tǒng)作為驅(qū)動(dòng)單元,是顫振激勵(lì)及分析系統(tǒng)研制中技術(shù)難度和風(fēng)險(xiǎn)較大的 - 關(guān)鍵字: PID 虛擬儀器 伺服系統(tǒng) 模糊
fuzzy-pid介紹
您好,目前還沒(méi)有人創(chuàng)建詞條fuzzy-pid!
歡迎您創(chuàng)建該詞條,闡述對(duì)fuzzy-pid的理解,并與今后在此搜索fuzzy-pid的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對(duì)fuzzy-pid的理解,并與今后在此搜索fuzzy-pid的朋友們分享。 創(chuàng)建詞條
fuzzy-pid電路
fuzzy-pid相關(guān)帖子
fuzzy-pid資料下載
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會(huì)員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機(jī)EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢(xún)有限公司
 京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢(xún)有限公司