一種新的模糊PID控制在電機軟啟動中的仿真

摘要:由于異步電機軟啟動過程中非線性時變的特點,采用傳統的PID控制方法難以達到理想的控制效果。為了大大減小交流電機啟動過程中的電流,在此結合智能控制理論,設計出一種新型的模糊PID軟啟動控制器。通過對電流大小進行控制,優化了系統的控制效果,實現了交流電機恒流軟啟動控制。最后通過Matlab仿真,證實了該系統具有良好的動靜態性能,達到了平穩啟動的目的,具有有效性和廣泛應用性。
關鍵詞:軟啟動;模糊控制;異步電動機;Matlab
0 引言
異步電機以其優良的性能及無需維護的特點,在工農業中得到廣泛應用。三相異步電機的啟動方法很多,比如直接啟動、自耦降壓啟動、延邊三角形啟動等等。對于風機泵類等恒功率負載,如果在額定電壓下直接啟動三相異步電機,啟動電流非常大(一般為Ie的5~8倍),易引起電網電壓下降,同時影響電網上其他用電設備的正常運行,這對于電機本身來講,沖擊電流造成局部溫升過大,降低電機壽命,給機械系統帶來強大的機械沖力,沖擊電流會以電磁波的形式干擾電氣儀表的正常運行。因此宜采用軟啟動的方法。
1 模糊PID軟啟動電路的結構及原理
模糊PID復合控制方法最大的優點是不依賴于被控對象精確的數學模型,適合于非線性、強耦合、不確定性的電機軟啟動復雜系統。異步電機軟啟動主回路結構見圖1,利用三對反并聯的單向晶閘管來實現交流調壓,晶閘管調壓的控制方式采用相位控制,用來改變晶閘管的相位角α,得到不同的電壓(頻率不變),從而實現電機的平穩啟動。
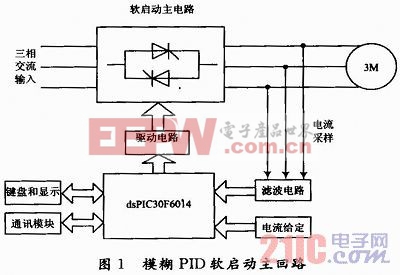
交流電機定子電流經過濾波后與啟動電流給定值一起作為模糊PID調節器的輸入信號。dsPIC30F6014型單片機首先計算出啟動電流設定值與反饋電流的偏差和偏差的變化率,然后以電流及電流的偏差作為輸入量,經過模糊化后進行模糊推理,最后將模糊推理結果通過解模糊后作為輸出調節量。解模糊調節器輸出的觸發信號,送至驅動電路,由觸發角決定每個周期觸發脈沖的產生時刻,從而調節晶閘管的輸出電壓,從而起到限制啟動電流,減小沖擊轉矩的作用。

pid控制器相關文章:pid控制器原理
三相異步電動機相關文章:三相異步電動機原理









評論