改進型PID神經元控制算法在APF控制中的應用

1.引言
本文引用地址:http://www.j9360.com/article/227102.htm并聯型有源電力濾波器是一種補償電力系統諧波的電力電子裝置,其主要的結構分為諧波檢測,PWM信號生成,直流側電壓控制及主電路4部分,其中,直流側的電壓控制的效果將直接影響到APF的補償結果。傳統的控制方法是采用PI控制器,因其結構簡單,調整方便,目前已經得到廣泛的應用。但是隨著控制技術的不斷發展,利用新的控制技術以使APF獲得更好的效果已成為大勢所趨。具有自學習適應能力的基于單神經元網絡的PID控制算法,結構簡單,且能夠適應環境的變化,魯棒性強,近年來成為研究的熱點。本文針對并聯型APF的特點,對基于單神經元網絡的PID控制算法進行一定的改進并通過仿真,證實了其在并聯型APF中應用的可行性和優越性。
2.并聯型APF的傳統控制方法
傳統的直流側電壓控制方法是為直流側電容提供一個獨立的直流電源,常用一個二極管整流電路來實現。這種方法雖然能夠保證直流側電壓的穩定,但是需要設置一個專門的電路,增加了系統的復雜程度,也增加了系統的損耗和成本,因此目前已經不采用這種方法。
現在直流側電壓的控制一般是通過對主電路進行適當的控制來實現,常用PI調節控制法,該方法將檢測到的電容電壓實際值與給定的參考電壓值相減,得到的差經過PI調節器得到調節信號,它疊加到瞬時有功電流的直流分量上,經運算在指令信號中包含一定的基波有功電流,補償電流發生電路根據產生補償電流注入電網,使得有源電力濾波器的補償電流中包含有一定的基波有功電流分量,從而使APF的直流側與交流側交換能量,對APF的損耗進行補償,將輸出電壓調節到給定值。
3.改進控制策略及算法
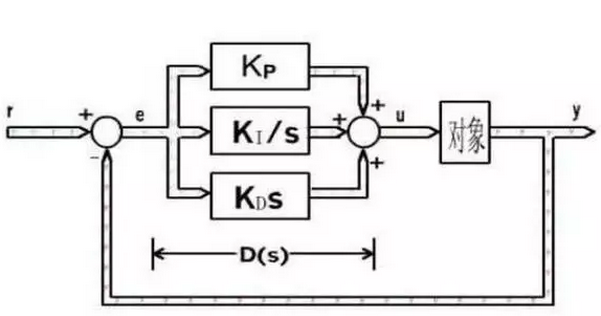
單神經元自適應PID控制的結構如圖1所示:
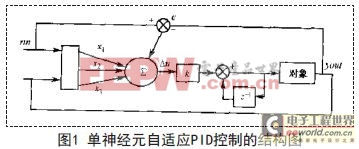
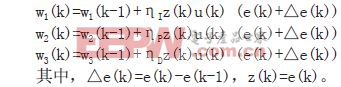
該控制器是通過對加權系數的調整來實現自適應與自組織功能,其中,權系數的調整是按照有監督的Hebb學實現的。其控制算法與學習算法為:

ηI、ηP、ηD分別為比例、積分、微分的學習速率,k為神經元的比例系數,其中k>0.對比例,積分,微分分別采用不同的學習速率,以便對不同的權系數分別進行調整。
在該算法中,k值的選擇尤為重要。k值越大,則快速性越好,但超調量偏大,容易造成系統的不穩定。若選擇過小,則使系統的快速性變差。
介紹了一種改進的單神經元PID自適應控制算法,該算法將加權系數學習修正部分進行了修改,將其中的xi(k)改為e(k)+△e(k),改進后的算法如下:
采用上述改進算法后,權系數的在線修正不完全是根據神經網絡學習原理,而是根據實際經驗制定的。
由以上所列算法可以看出,兩種控制算法的輸出u(k)都是基于增量式PID控制算法的計算,僅適用于執行機構要求是控制量的增量的控制系統。因此,其在并聯型APF的控制策略應用中,效果不好。
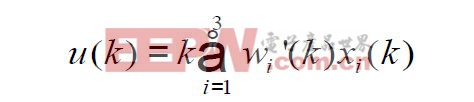
在并聯型APF的直流側電壓控制中,其控制結果由輸入的信號計算而得出,可將輸入信號轉化成一組離散信號,利用數字式PID控制器進行控制,這樣既減小了系統的計算量,同時,由于輸出結果不受前一個數據的影響,使得控制輸出能夠更快的達到預期的值。本文選擇位置式PID控制算法,將其與單神經元自適應PID控制算法相結合,在上一算法的基礎上,對u(k)的表達式進行修改,得出新的控制算法:
在此算法中,K值的設置對系統的運行影響很大,因此需要進行多次的實踐來進行調整。
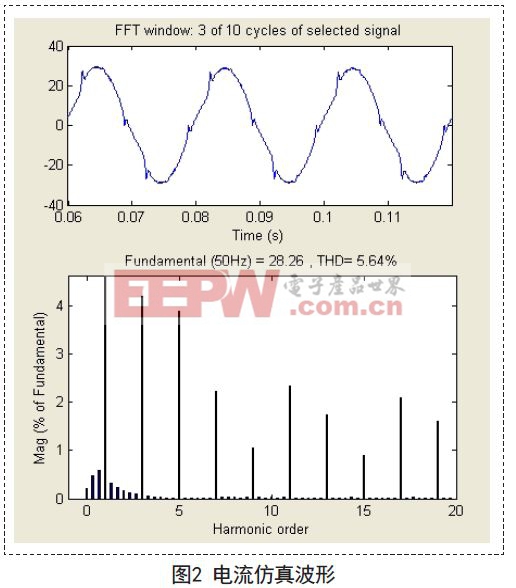 4.仿真結果
4.仿真結果本文的仿真模型參考中的并聯型APF仿真模型,利用MATLAB中的SIMULINK搭建好仿真平臺,分別應用提出的改進算法,本文提出的改進算法,與傳統PI控制器的控制結果進行比較。
首先使用PI

pid控制器相關文章:pid控制器原理
評論