改進型PID神經元控制算法在APF控制中的應用

可以看到,補償后的電流穩定后諧波占有率為5.64%,效果一般。
利用MATLAB的M文件,將提出的改進算法編寫好,將SIMULINK控制模塊代替PI控制器,其中K值設置為0.1.運行程序,結果如圖3所示。
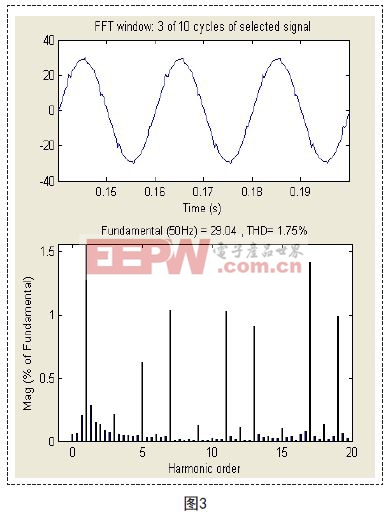
由此可見,提出的改進的算法在并聯型APF中應用后,取得了較好的補償效果,其補償后電流諧波占有率降低到1.75%,比PI控制器的控制效果有了顯著地提高。
最后應用本文所提出的改進算法,同樣將K值設置為0.1,運行程序,結果如圖4所示。
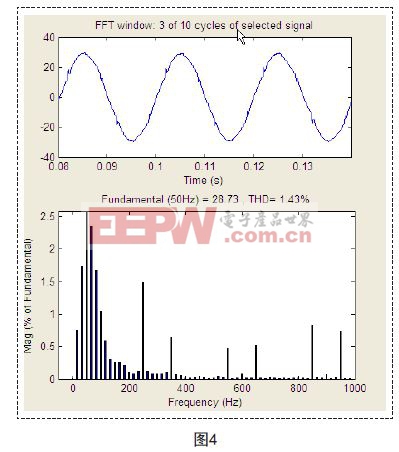
由以上仿真結果可以看出,補償后電流諧波占有率降低到1.43%,由此可見,本文所提出的改進算法在APF的應用中,其應用效果優于其他的控制算法。
5.結論
本文將位置式PID控制算法與單神經元自適應PID控制算法相結合,對輸出表達式進行修改,得出新的改進型PID神經元控制算法,該算法經過仿真,在并聯型APF中應用中,與傳統PI控制器及PID神經元控制算法相比較,取得了更好的補償效果。近年來,隨著控制技術的不斷發展,神經元PID控制技術[4]發展較快,其在APF研究領域中也將逐步得到更加廣泛的應用,本文所提出的改進算法,收斂速度快,精度高,具有一定的實用意義。

pid控制器相關文章:pid控制器原理
評論