基于FPGA的多路光柵信號采集方案

0 引言
本文引用地址:http://www.j9360.com/article/221567.htm光柵傳感器作為精密機械量測量的有效工具在線位移、角位移、速度、加速度等工程的測量上得到了廣泛應用。在長度測量中,光柵微位移傳感器可以達到μm級的測量精度,同時可以動態采集長度的變化,從而可以精確地算出運動速度甚至加速度。在曲面測量中,相比于傳統的三坐標機、輪廓儀,光柵傳感器也具有可以動態檢測面形變化,精度高,可以實時輸出面形數據等優勢。
多路選擇技術的數據采集中得到了廣泛應用,在一些分布式系統當中,使用多路選擇技術可以減少I/O 口使用數量,提高系統集成度。具體來說,使用多路選擇開關對多路信號進行選通處理,將多路選擇開關的輸出端連接采集芯片的I/O口,使采集芯片對各路信號進行輪番采樣,但輪番采樣使得原始波形的采集離散化,即在芯片對采得的離散信號進行處理前,需要對采得的波形進行處理。
1 系統整體方案
系統選用了60 支高精度光柵傳感器(精度為0.5 μm),按環帶狀排布,以測量圓狀動態面形變化。
實際測量時,60個光柵微位移傳感器安放在測量臺上,待測面形與各傳感器接觸,待測面形變化時,各路光柵傳感器會產生相應的位移,將面形各采集點處的數據變化采集起來,通過一定的插值算法還原面形的動態變化。
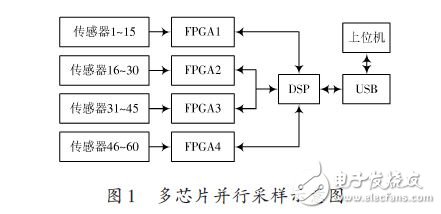
通常情況下,采集系統選用FPGA作為光柵信號的采集芯片。因系統涉及的信號路數較多,單片低端FPGA 很難滿足信號采集的要求,故需要多片FPGA 并行工作,最后用一片DSP芯片或單片機對多片FPGA進行輪番尋址取值,再將各傳感器的數據傳送給上位機,如圖1所示。系統結構設計較為復雜,成本也較高。
本文提出了一種基于多路選擇技術的多路信號采集方案,針對多路信號無法同時被單芯片采集的問題,采用串、并結合采樣的方法,可以在滿足采樣精度要求的情況下,實現單FPGA上的多路信號采集,如圖2所示。
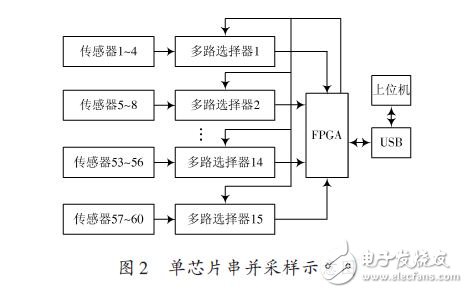
每個傳感器輸出信號中,表示傳感器移動距離的信號有兩路(A、B)。4 個傳感器分為一組,共有8 路信號(1A、…、4A,1B、…、4B)。將1A~4A 接雙4 位多路選擇開關(如74HC4052)的1Y0~1Y3,1B~4B 接多路選擇開關的2Y0~2Y3.FPGA發出2位控制信號同時控制該多選芯片MUX1.即FPGA控制信號為00時,MUX1的1Z輸出為1A,2Z輸出為1B,此時FPGA接收到的信號為傳感器1 的信號。FPGA 的控制信號進入下一個狀態01時,MUX1的1Z 輸出為2A,2Z 輸出為2B,此時傳感器2的信號被采集。依次類推,傳感器4的信號之后重新返回到傳感器1上。這樣就形成一個循環采樣的過程。
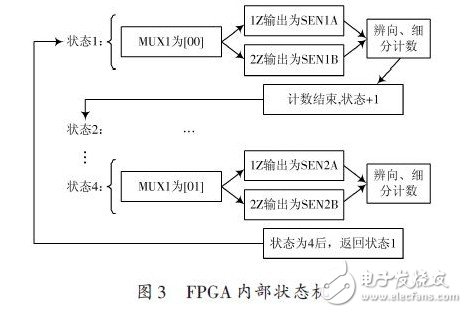
在對采樣頻率要求不高時,多路并行采樣可以節省很多IO資源,同時精度也可以得到保證。FPGA內部用狀態機可以完成多路選擇的控制,如圖3所示。

fpga相關文章:fpga是什么











評論