基于FPGA的多路光柵信號采集方案

2 光柵信號預處理
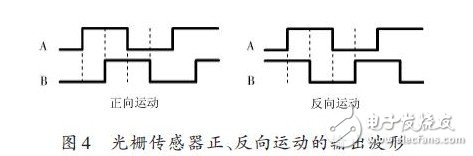
本文引用地址:http://www.j9360.com/article/221567.htm光柵位移傳感器輸出為兩路相位相差90°的方波信號,如圖4所示,正常情況下可以通過兩路波形的上升、下降沿的個數來計量位移的實際變化;并由兩路信號的瞬時相位變化得出位移的移動方向。但由于本方案使用循環采樣的方法,使得某路光柵信號只有14 被采集到,故需通過相關方法還原原始信號。
這里采用通過濾波引入臨時信號的方法,將采集信號通過時鐘延時將采樣波形保持為采樣值四個時鐘周期,生成類似于原始信號的臨時信號,如圖5所示。
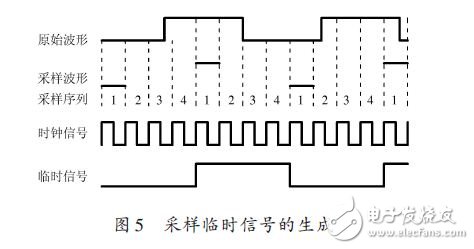
濾波的作用是消除毛刺等噪聲對采樣信號產生的影響,常規的濾波方法為通過對若干個時鐘周期內信號的判斷來實現。當幾個時鐘周期內信號的值并未發生跳轉時,認為信號值為真實值,可以作為進一步處理的臨時信號,如圖6所示。可以看出臨時信號僅僅比原始波形信號滯后了若干時間(該滯后時間所對應的時鐘周期數小于串行采樣數,此處串行采樣數為4),這樣可以基本準確地還原原始的波形,細分辨向計數等操作基于該臨時信號,當信號周期遠大于時鐘周期,即光柵信號變化緩慢時,對采樣的精度基本沒有影響。

3 多路光柵信號并行采集
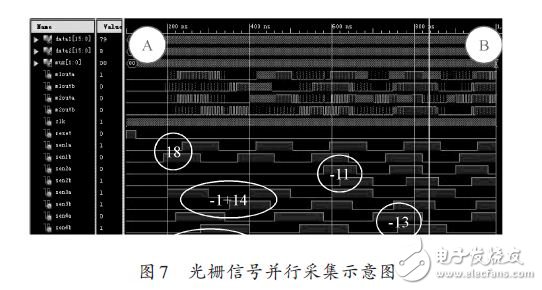
對8 路光柵信號按上述方法進行處理,如圖7 所示。在圖中所示范圍內,傳感器1~4產生以下信號:增加18、減少11、先減1再加14、減少13.
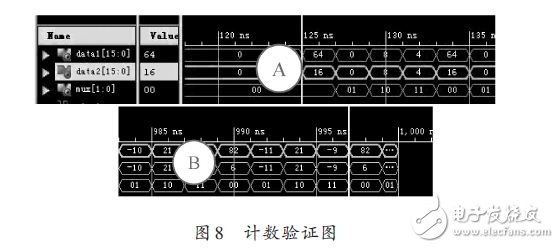
觀察圖中A、B兩處的計數,如圖8所示。A處傳感器1~4的初始值為64,0,8,4,B處可見傳感器1~4的計數值為82,-11,21,-9.與產生的脈沖信號完全符合,說明實現了正確的數據采集。
4 結論
本方案適用于低速且輸入較多的數據采集裝置,對于高速信號,信號周期與時鐘周期相差倍數較小時,此法會造成有效信號的損失,并不適用。當信號周期遠大于時鐘周期時(Ts 》 20Tclk ),引入的臨時信號僅僅比原始信號滯后幾個時鐘周期(該滯后小于并行采樣數乘以時鐘周期),整體上可以比較好地還原初始波形。同時,臨時信號還能有效消除一個時鐘周期內的部分波形抖動,實現準確的低速多輸入數據采集。

fpga相關文章:fpga是什么











評論