端到端來了,激光雷達就沒有明天了嗎?

一直以來,純視覺技術路線和多傳感器融合技術路線之爭都是自動駕駛領域最為引戰的話題,沒有之一。
本文引用地址:http://www.j9360.com/article/202501/466216.htm兩年前,特斯拉推出占用網絡之后,小鵬汽車自動駕駛部門負責人吳新宙大受震撼地表示激光雷達廠商應該轉型了,兩年時間過去了,激光雷達不僅沒有被消滅,頭部激光雷達廠商的營收反而繼續錄得翻番式的同比增長。
不過,危機始終存在,最近一年來,端到端范式的出現極大地提高了視覺神經網絡的性能,純視覺方案展現出了可以逼近人類老司機水平的美好前景,在這樣的背景下,本土頭部智駕車企小鵬、蔚來、極越紛紛推出了純視覺高階智駕方案,剛剛逃過一劫的激光雷達有可能再次面臨生死難關嗎?
端到端大幅提升純視覺智駕系統性能
在2024年第三季度的財報電話會議上,馬斯克表示,進入2024年以來,端到端形式的FSD性能提升了兩個數量級,而且,從當前的V12.5到即將于11月份推出的V13,性能還將有5-6倍的提升。這么算下來,單看2024年,特斯拉FSD的性能提升幅度至少高達500倍。
鑒于馬斯克在自動駕駛上的表態一向過于夸張,最好還是參考一些國內友商的說法。頭部智駕方案商Momenta掌門人在最近的一次采訪中表示,自轉向端到端技術路線以來,Momenta面向量產乘用車的高階智駕產品Mpilot的性能提升了不止10倍。

圖片來源:Momenta
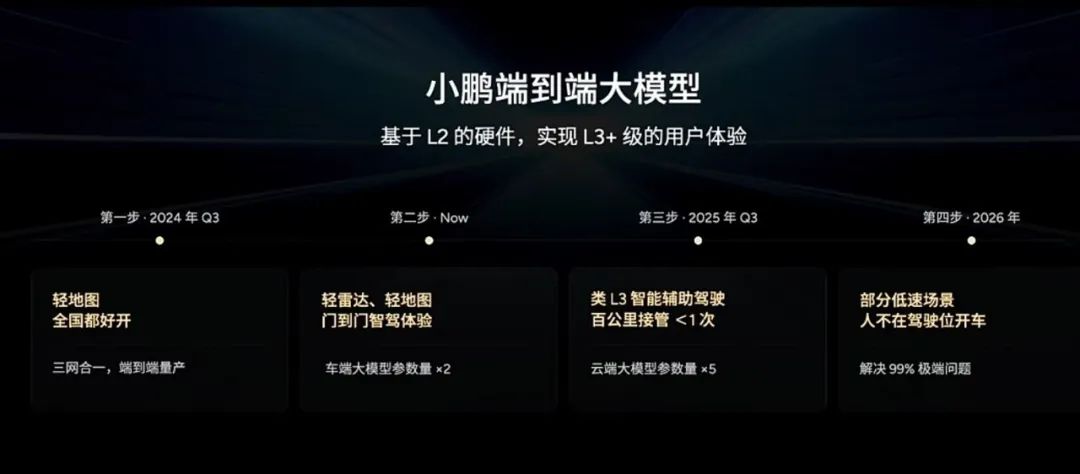
車企方面,頭部智駕車企小鵬汽車在5月20日的AI Day上表示,將在未來18個月內將XNGP的性能提升30倍,于2025年底實現類L4級的智能駕駛體驗。
嘗到端到端范式甜頭的還有理想汽車,在6月份的藍皮書論壇上,理想汽車掌門人李想表示,理想汽車將在一年內實現L3,三年內實現L4,具體的數字上,在8月底的成都車展上,理想汽車對外公開了平均接管里程在端到端范式的驅動下肉眼可見的飛速變化。
自7月30日到8月26日,不到一個月的時間,理想智駕系統的平均接管程從12.21公里提升到21.8公里,一個月不到,MPI取得了近乎翻番式的增長,這種迭代速度在一年前簡直是不可想象的。
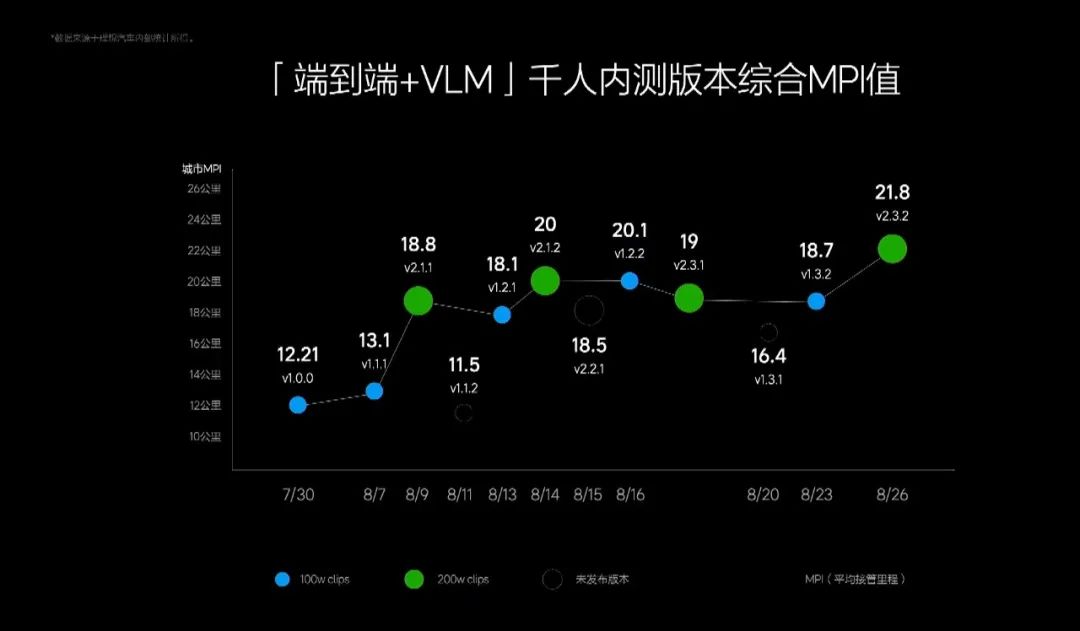
圖片來源:理想汽車
總之,端到端范式終于讓高階智能駕駛從理想走進現實。特斯拉、本土頭部智駕車企和方案供應商的智能駕駛系統性能在一年內都取得了十幾倍甚至幾十倍的跳躍式增長,而且,系統性能迭代的速度肉眼可見大大加快了。
特斯拉FSD性能的突飛猛進以及特斯拉剛剛推出的無人駕駛出租車依然不搭載激光雷達的事實似乎表明,端到端純視覺方案可以兌現通向高等級自動駕駛的美好前景。在視覺神經網絡初步具備智能涌現能力且有望繼續提升性能的情況下,激光雷達是不是可以退休了呢?
當然不是,因為激光雷達的核心價值在于提升行車安全,而純視覺方案恰恰在安全上存在一定的天花板。
多傳感器融合的核心價值在于行車安全
純視覺和多傳感器融合的爭論由來已久,本文無意介入立場的爭論,倒是可以轉述幾位大佬的看法:
“
在沒有搭載激光雷達的樂道L60發布會后的媒體見面會上,蔚來汽車掌門人李斌表示,認為激光雷達沒有用的人非蠢既壞;
剛剛推出AI鷹眼視覺方案的小鵬汽車掌門人何小鵬在發布會中表示,AI鷹眼視覺方案能夠做到在99.9%的場景下性能不輸于帶激光雷達的XNGP MAX版本;
國內頭部激光雷達廠商禾賽科技有一個類似的說法:激光雷達可以幫助應對1%的復雜場景。
圖片來源:禾賽科技
我們無從得知何小鵬99.9%這個數字的背后有沒有嚴謹的科學推算,也不用糾結從1%到0.1%到底發生了什么。直接撥開浮云遮望眼,站在第一性原理的角度,多傳感器融合對比純視覺方案的優勢可以利用更大波長范圍的信息。
據悉,攝像頭檢測的可見光的波長介于350納米到740納米之間,量產車用激光雷達發射和接收激光的波長介于740納米到1550納米之間,毫米波雷達的雷達信號波長在4毫米左右。
根據物理規律,波長越長,光的穿透能力越強,4D毫米波雷達可以處理的雷達信號的波長遠超于可見光和激光雷達發射的激光,不會受限于光線的遮擋,它可以檢測到前前車(位于前方車輛的前方那一輛車)的核心原理就在這里。
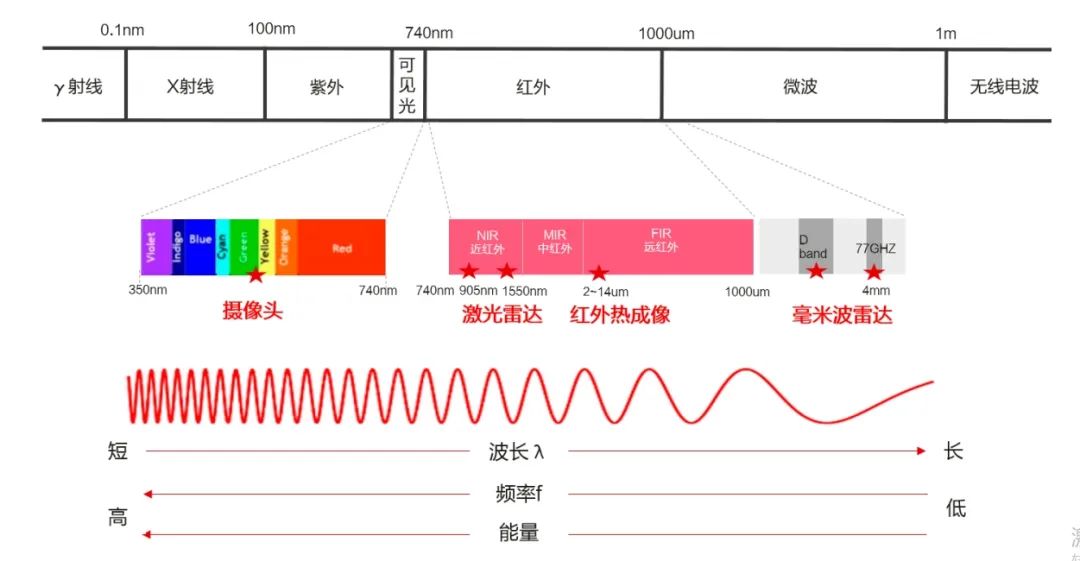
圖片來源:華為
具體到激光雷達,激光的波長更長,穿透能力也強于可見光,不過,其核心優勢不在這里,在光照魯棒性和精確測量距離信息上。這一波端到端熱潮較大地提升了視覺神經網絡的能力,使其可以在一定程度上提升暗光、炫光、逆光場景下的表現,并通過海量的數據學習,掌握了從2D圖像中準確估計3D深度信息的能力。
但是,這并非意味著激光雷達可以放馬南山、刀槍入庫了。

圖片來源:小鵬汽車
在光照適應能力方面,激光雷達的工作可以完全不依賴有沒有光、光照條件怎么樣,而視覺神經網絡無論怎樣進化,還是要依賴一定的光照亮度的,在創世紀里,上帝說有光就有了光,要是說沒光就沒了光了呢?
在距離信息方面,由于汽車要在3D空間中駕駛,行車安全與自車與旁車距離、與障礙物之間的距離密切相關,激光雷達通過飛行時間測量到物體表面的距離,直接給出精確的距離信息,直給當然比AI估計具備天然的優勢。此外,一些誤導性的場景也容易使AI視覺神經網絡得出錯誤的深度信息。
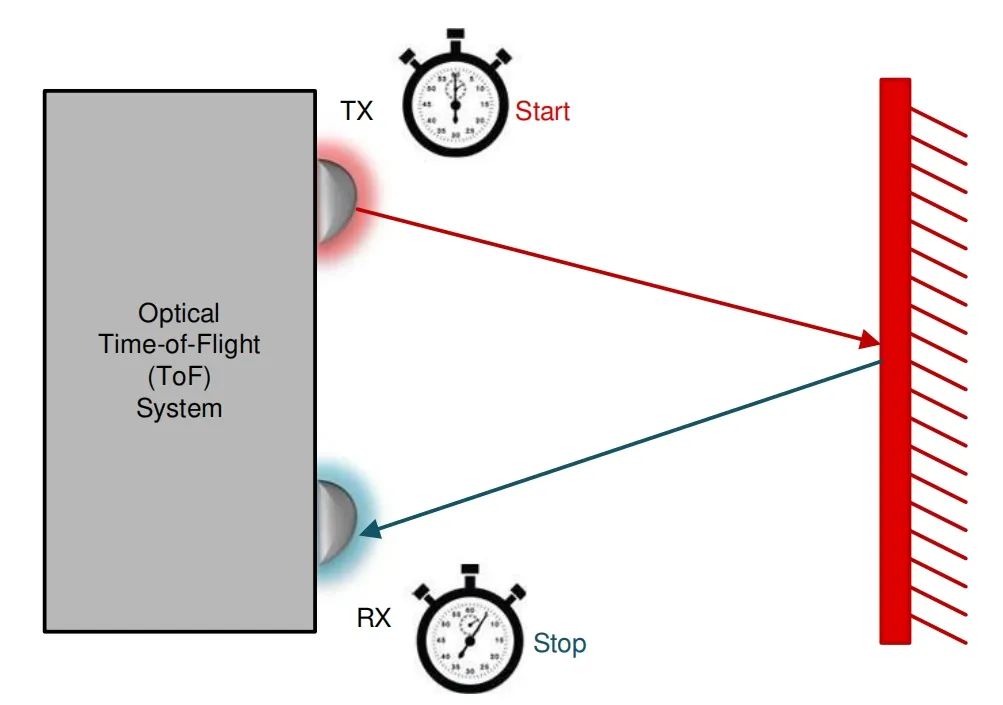
圖片來源:德州儀器
其后果就是,雖然基于端到端大模型的視覺方案可以更省錢,能夠基于L2的硬件實現L3+級的用戶體驗,但是,在1%(禾賽科技)的場景下,視覺方案無法保證行車安全。
圖片來源:小鵬汽車
所以,雖然激光雷達的生存空間在能力突飛猛進的AI視覺神經網絡的不斷擠壓下逐漸弱化,但它依然將AEB發展成了兵家必爭之地。激光雷達的核心價值就在這里,保障行車安全,并提高安全的天花板。
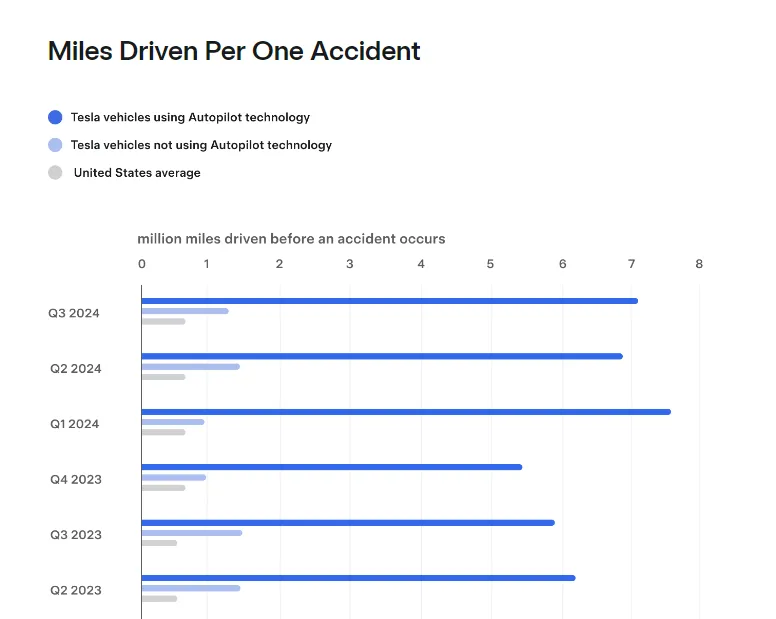
堅守純視覺路線的特斯拉剛剛推出的無人駕駛出租車Cybercab也沒有使用激光雷達,一方面是因為馬斯克可以“自研”L4等級的判斷條件,另一方面則在于特斯拉沒有把大幅度提高智駕安全作為自己的愿景。
如果取信馬斯克的話,相較于年初的版本,特斯拉FSD V13將平均接管里程提升了至少三個數量級,但是,與行車安全密切相關的百萬公里事故率只進步了20%!MPI提升1000倍,安全水平提升0.2倍,如此巨大的差距,原因就在于只使用攝像頭的純視覺方案可以極大地提升在99%的場景下的表現,卻受限于光照條件、天氣條件、AI神經網絡的幻覺無法很好地應對那1%的復雜場景。
圖片來源:特斯拉
寫在最后
對于很多人來說,純視覺路線的特斯拉FSD已經將安全性提高了10倍,十倍的安全性能提升足夠了,生死有命,富貴在天,還要啥自行車呢?但是,人機共駕狀態下的安全性提高10倍絕不等同于全自動駕駛狀態下的安全性提升十倍,而且,堅守多傳感器融合陣營的華為們也有著更高的追求。
全球累計投入自動駕駛賽道十幾萬億,最終的結果是讓幾千萬司機下崗,付出如此巨大的代價,為何不追求更高的安全目標呢?






評論