無人駕駛即將爆發:激光雷達必不可少

2017年亞洲消費類電子產品展覽會(CES Asia 2017)于北京時間2017年6月7日至9日在上海舉辦。我們不難發現,此次眾廠商在無人駕駛方面的布局有所增加,寶馬公司以及英特爾公司也分別開展了試駕活動和無人機的展示。我們可以肯定的是,無人駕駛是汽車的未來,但眾多傳感器是實現無人駕駛必不可少的,尤其是激光雷達,更是重中之重。
本文引用地址:http://www.j9360.com/article/201706/360347.htm
激光雷達(LiDAR)是無人駕駛汽車中最強大的傳感器之一。它可以區分真實移動中的行人和人物海報、在三維立體的空間中建模、檢測靜態物體、精確測距。它是通過發射激光束來探測目標位置、速度等特征量的雷達系統,具有測量精度高、方向性好等優點, 在軍事領域以及民用的地理測繪等領域都有廣泛的應用。 由于激光雷達可以形成精度高達厘米級的 3D 環境地圖, 因此在 ADAS 及無人駕駛系統中具有重要作用。
激光雷達的原理與結構
與雷達原理相似,激光雷達使用的技術是飛行時間(TOF, Time of Flight)。具體而言,就是根據激光遇到障礙物后的折返時間,計算目標與自己的相對距離。激光光束可以準確測量視場中物體輪廓邊沿與設備間的相對距離,這些輪廓信息組成所謂的點云并繪制出3D環境地圖,精度可達到厘米級別,從而提高測量精度。
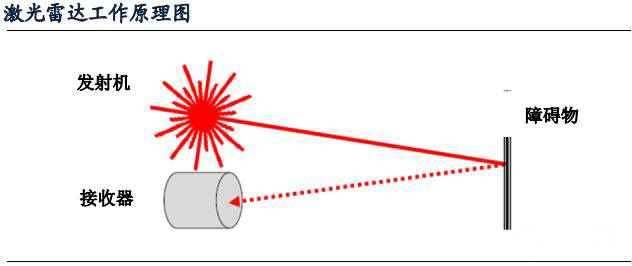
在ADAS系統中,激光雷達通過透鏡、激光發射及接收裝置,基于TOF飛行時間原理獲得目標物體位置、移動速度等特征數據并將其傳輸給數據處理器;同時,汽車的速度、加速度、方向等特征數據也將通過CAN總線傳輸到數據處理器;數據處理器對目標物體及汽車本身的信息數據進行綜合處理并根據處理結果發出相應的被動警告指令或主動控制指令,以此實現輔助駕駛功能。
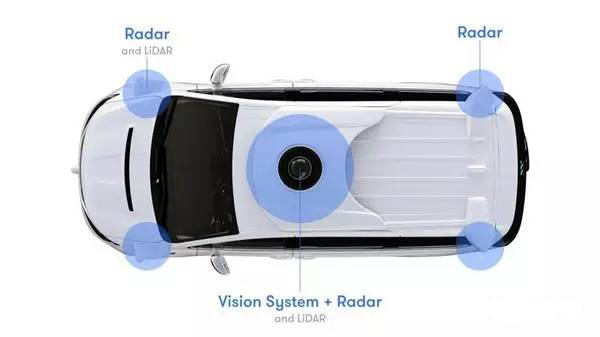
下圖展現的是谷歌無人駕駛公司Waymo在汽車上使用的激光雷達的布局:
激光雷達的分類
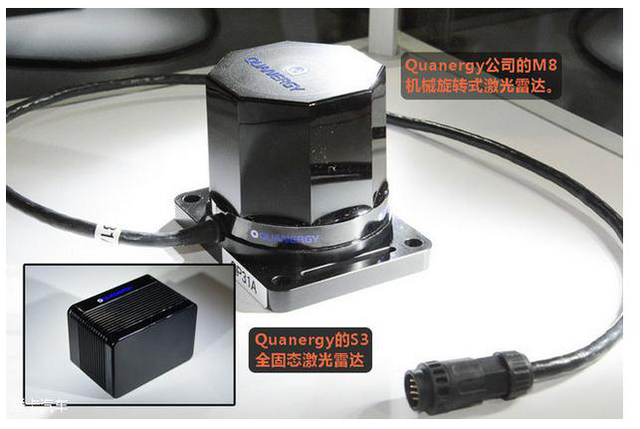
激光雷達按有無機械旋轉部件分類,包括機械激光雷達和固態激光雷達。機械激光雷達帶有控制激光發射角度的旋轉部件,而固態激光雷達則依靠電子部件來控制激光發射角度,無需機械旋轉部件。
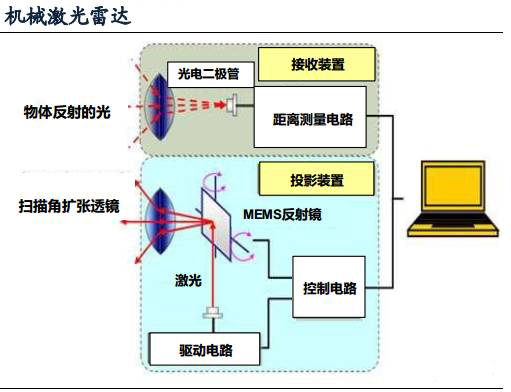
機械激光雷達由光電二極管、MEMS反射鏡、激光發射接受裝置等組成,其中機械旋轉部件是指圖中可360°控制激光發射角度的MEMS發射鏡。
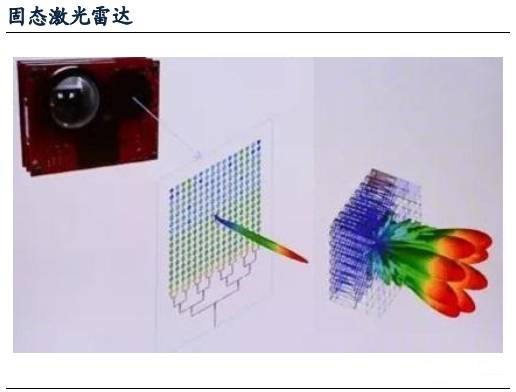
固態激光雷達與機械雷達不同,它通過光學相控陣列(OpticalPhasedArray)、光子集成電路(PhotonicIC)以及遠場輻射方向圖(FarFieldRadiationPattern)等電子部件代替機械旋轉部件實現發射激光角度的調整。
由于內部結構有所差別,兩種激光雷達的體積大小也不盡相同。機械激光雷達體積較大、價格昂貴、測量精度相對較高,一般置于汽車外部。固態激光雷達尺寸較小、性價比較高、測量精度相對低一些,但可隱藏于汽車車體內,不會破壞外形美觀。
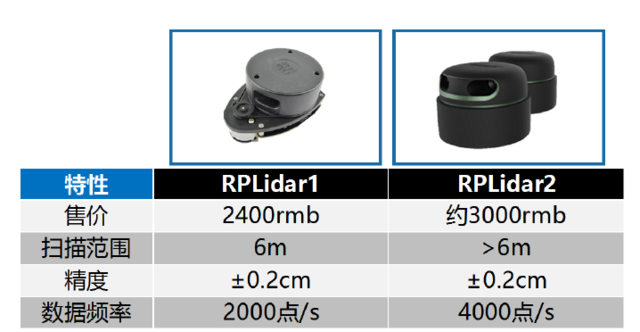
根據線束數量的多少,激光雷達又可分為單線束激光雷達與多線束激光雷達。顧名思義,單線束激光雷達掃描一次只產生一條掃描線, 其所獲得的數據為2D數據,因此無法區別有關目標物體的3D信息。不過, 由于單線束激光雷達具有測量速度快、數據處理量少等特點, 多被應用于安全防護、地形測繪等領域。
多線束激光雷達掃描一次可產生多條掃描線,目前市場上多線束產品包括4線束、8線束、16線束、32線束、64線束等,其細分可分為2.5D激光雷達及3D激光雷達。2.5D激光雷達與3D激光雷達最大的區別在于激光雷達垂直視野的范圍,前者垂直視野范圍一般不超過10°,而后者可達到30°甚至40°以上,這也就導致兩者對于激光雷達在汽車上的安裝位置要求有所不同。

Velodyne激光雷達



評論