基于LIN總線的汽車雨刮控制系統設計


3.5 電機驅動模塊
電機驅動模塊是系統的核心部分,其承擔著雨刷電機的正轉和反轉,以及檢測電流的變化,當雨刷遇堵轉時則作出相應的處理。出于成本及穩定性等多方面因素的考慮,選用Freescale的汽車電子芯片MM908E625,用于開發汽車分布式控制單元,該芯片取代了傳統的MCU、H橋驅動器和LIN物理層收發器的解決方案,有效降低了外圍器件的數量,且減小了成本。
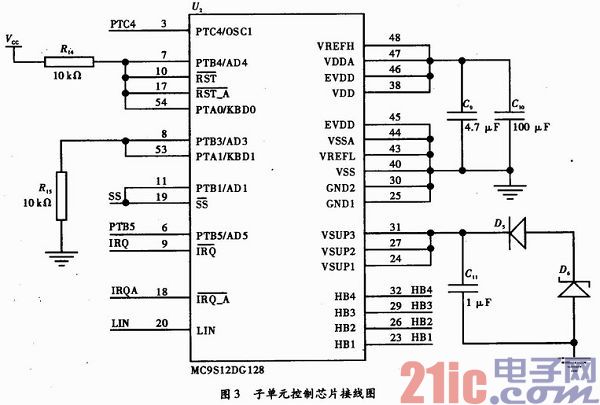
模塊采用MM908E625直接控制雨刷繼電器的方法,繼電器選用歐姆龍的G5CA-1A-E,并利用H橋低端通道的電流反饋功能實時監控電機的工作狀態。通過模擬多路復用器選擇相應的H橋低端通道,并采用MCU上的ADC監測該電流來判斷電機是否堵轉,當電流大于某一閾值時,故障信息會被單片機采集,并進行相應處理,并通過LIN總線傳輸到主控單元的液晶屏顯示。片內集成的LIN物理層收發器通過MCU上的ESCI模塊實現LIN協議的數據鏈路層驅動器,從而實現LIN總線通訊的功能。子單元控制芯片引腳使用情況,如圖3所示。
4 控制系統軟件設計
電機檢測模塊對電機的運行狀態進行檢測,然后將不同的檢測信息分別發送給消息解析模塊和電機控制模塊,通過這些檢測信息,對電機進行有效的控制。檢測信息經解析處理后,分別發送給LIN通信和功能處理模塊,LIN模塊將信息發送到LIN總線上,實現系統和網關的通信。診斷模塊將從功能處理模塊上獲得的故障信息進行診斷,也同樣通過LIN通信模塊和網絡進行通信。電機控制模塊通過接收到的檢測信息,來判斷雨刷電機的轉速,再將輸出轉速和檢測轉速進行對比,經優化算法得出更為優化的控制。
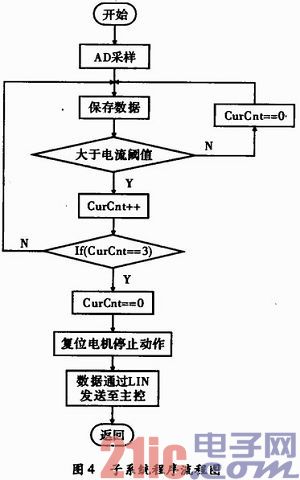
由于MM908E625內部并未集成EEPROM,因此雨刷電機的閾值電流等信息需通過LIN總線發送到主控單元進行保存,系統上電啟動時,再進行初始化。此外通過LIN總線去讀取主控單元的觸摸輸入信號,以控制雨刷電機的運轉。在運行過程中,實時采集電樞的電流,判斷是否大于閾值電流IM,若電流值大于閾值電流3次,則將雨刷電機復位,停止刮水動作。此過程中,子控制器將當前雨刷的狀態參數通過LIN總線實時反饋給主控器并進行顯示。子系統軟件流程如圖4所示。
5 實驗測試
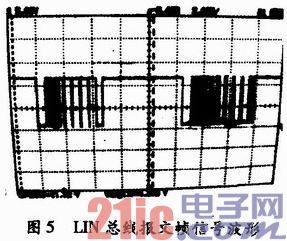
圖5所示為智能雨刷控制系統工作時,使用示波器采集到的LIN總線上報文幀的信號波形。從圖中顯示的兩個報文幀可看出,每個報文幀由幀頭和響應組成,兩個報文中間是中斷場。圖中信號的峰值電壓為11.72 V,表明LIN總線采用12 V供電模式。電樞電流的正常值為6 A,人為使電機堵轉時,電流上升至10 A,在經過一段時間后,雨刷電機復位,停止刮水動作。經反復測試,該系統可根據雨量大小對雨刮運轉速度進行智能控制,實現預期的智能控制。
6 結束語
本文介紹了基于LIN總線的智能雨刷系統設計,通過紅外傳感、電流檢測和主控液晶進行了檢測控制,并可根據雨量大小對雨刮運轉速度進行智能控制,無需駕駛員手動控制。同時將其接入LIN網絡,簡化了硬件結構、提高了安全性且降低了成本。實驗結果證明,該系統運行穩定,達到了預期的功能。






評論