基于TMS320F28335的氣球吊籃姿態監測裝置設計

摘要:針對氣球吊籃對姿態控制的要求,本文給出以TMS320F28335為平臺,開發設計出具有姿態數據采集、姿態數據處理、以及姿態實時監測功能的裝置。姿態監測裝置中用MEMS電子陀螺儀和地磁計獲得姿態的采樣數據,采樣數據通過TMS320F28335解算為航偏角、俯仰、橫滾三姿態數據,PC作為顯示終端監控姿態實時變化,裝置能夠滿足氣球吊籃對姿態監控和測量的要求。
本文引用地址:http://www.j9360.com/article/201610/309083.htm科學氣球在大氣物理、空間科學、遙感等領域具有突出的應用優點。如今科學氣球作為高空探測的平臺,因為其成本便宜,施放簡單,易于維護的優點,一直作為高空探測的重要手段。科學氣球因為體積大會在高空飛行過程中受到紊亂氣流影響,致使表面風壓不同造成隨機緩慢的旋轉現象,這也將導致掛載吊籃姿態的跟隨變化。然而在一些領域需要一種可控的探測平臺,這就需要吊籃的姿態可以控制。科學氣球在飛行過程中吊籃處于視野觀測范圍外,需要設計一種搭載在科學氣球吊籃內部并且能夠實時測量吊籃飛行狀態,將實時狀態反饋給姿態控制系統,從而實現吊籃的姿態控制,作為科學氣球吊籃姿態控制的重要組成部分。文中提出了一種姿態測量系統設計和實現,文中描述了硬件設計、軟件程序設計和最后測試結果。
1 系統結構及工作原理
科學氣球吊籃姿態測量系統分為掛載部分和地基部分,除PC終端將置于地面進行實時監測,其余模塊均屬于掛載部分,這些模塊將跟隨科學氣球吊籃升空,在科學氣球吊籃穩定飛行過程中實現實時測量、運算以及回傳數據到地面設備。
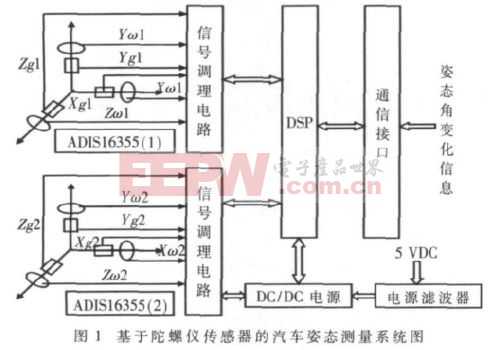
掛載部分包括TMS320F28335平臺、電子羅盤、地磁傳感器、電源、無線數傳模塊。主要系統結構如圖1所示,數據處理核心為TMS320F28 335的數字信號控制器(DSCs),外圍包括傳感器調理板,通信模塊,電源模塊,外部擴展模塊。

設計中利用底板作為外設及傳感器模塊連接硬件接口,其中PC端采用RS232連接在底板,單片機采用TTL電平串口連接底板,HM5883和MPU 6050采用I2C總線連接到單片機上。系統穩定工作時,HM5883以及MPU6050數據通過單片機發送給TMS320F28335,姿態數據由TMS320F28335發送給PC終端。
2 系統的硬件設計
TMS320F28335為TI公司最新DSPC28X系列32位浮點DSCs(Digital Signal Controllers),具有150 MHz的時鐘工作頻率,其芯片內核供電為1.9 V,I/O口供電問3.3 V,芯片上集成256 kx16 bit Flash以及34 kx16 bit SARAM,并且具有3個SCI口(SCIA、SCIB、SCIC),芯片高性能能夠滿足系統數據收發和姿態解算的要求。單片機選用STM32芯片,這種芯片是基于ARM Cortex—M3內核,具有72 MHz工作頻率,64 kB閃存存儲器。
姿態傳感器選用應美盛公司的MPU6050芯片,這種微機電姿態傳感器為全球首款整合了三軸陀螺儀和三軸加速度運動處理器件,具有131 LSBs/°/sec靈敏度,其角度測量范圍在±250~±2000°/s。HMC5883(HMC5883L)是霍尼韋爾公司的高分辨率的磁阻傳感器,具有霍尼韋爾公司最先進的(AMP)技術,可以有效的使得羅盤精度控制在1°左右。這里MPU6050和HMC5883均為數字型傳感器,芯片分別內嵌16 bit和12 bit ADC模塊,量化數據通過I2C總線傳出。
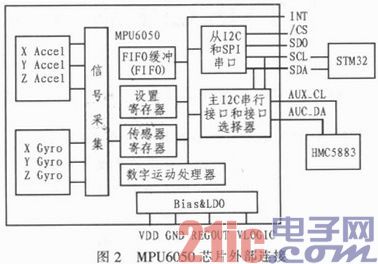
圖2中為MPU6050電路設計框圖,其擁有2條I2C通道,并且通過內部串行通道選擇器相連接,圖中的連接方式可以組成三軸陀螺儀、三軸加速度和三軸地磁計組成的9軸姿態傳感器件;MPU6050的FSYNC和INT連接到STM32上。
電路設計如圖3中MPU6050供電電壓范圍為2.375~3.46 V,設計中采用LM1117-3.3 V供電芯片設計,MPU6050有VDD供電電源端以及VLOGIC邏輯電源端口,其供電要求VDD超前VLOGIC>0 ms,且VDD上升沿滿足100 ms,VLOGIC上升沿3 ms,VLOGIC連接線上串聯10 mH電感可滿足要求,SDA與SCL分別為I2C總線的是數據線和控制線連接到STM32單片機的PB6、PB7,HMC5338地磁極SDA、和SCL分別連接到MPU6050的AUX_SDA和AUX_SCL端即可組成圖1中的9軸傳感器。
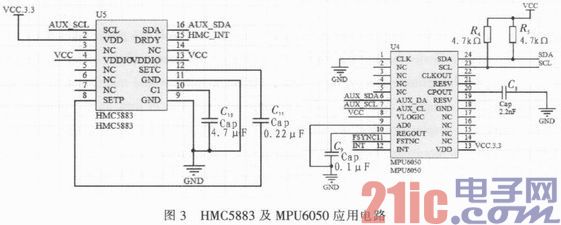
圖4為STM32最小系統電路,利用STM32單片機作為量化數據的預采集處理并與DSCs進行應答式數據傳送,這種方式比連續異步傳輸方式節約系統資源,同時減小DSCs的片上資源消耗和程序復雜程度。設計中考慮STM32獲取數據準備完成信號由HMC_INT管腳產生,PA5口連接到HMC 5883傳感器15管腳,同時串口通道與DSCs的SCITXDB與SCIRXDB連接,用于采樣數據交換。
3 系統的軟件設計
系統軟件設計包括STM32片上程序、DSCs片上程序和上位機顯示程序。首先由STM32依次初始化MPU6050和HMC5883,MPU6050初始化包括時鐘、陀螺儀量程、加速度量程、I2C與HMC5883連通方式和中斷信號產生條件。HMC5883初始化包括設置HMC5883工作模式、更新速率設置和傳感器FIFO初始化。
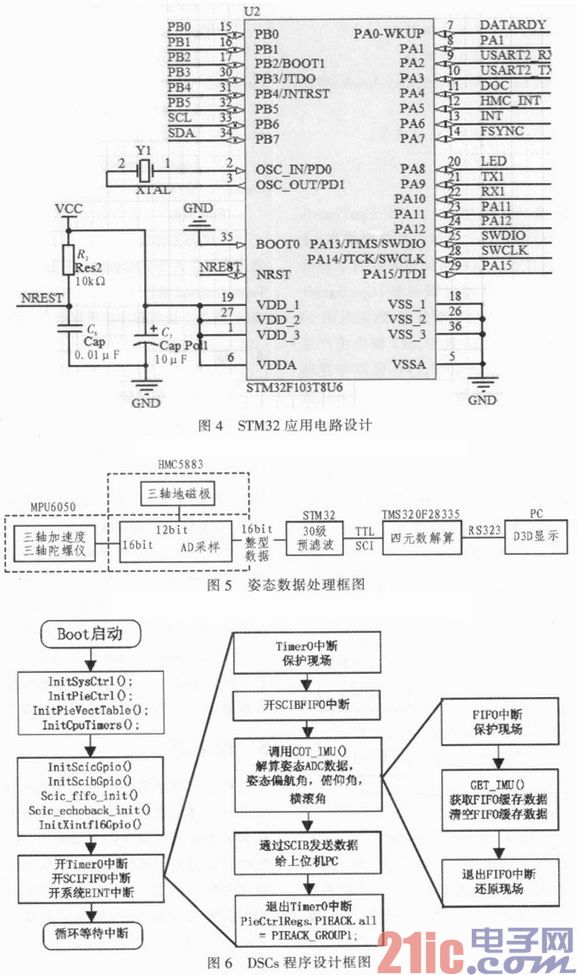
圖5為信號處理流程圖,模擬信號通過AD采樣獲得量化數據,對量化數據進行初級平滑濾波后獲得采樣數據,采樣數據通過速率115200串口發送給TMS320F28335,傳輸過程有0.02%的誤差率,當TMS320F28335串口14級緩沖FIFO數據完全載入后會向內核產生SICBRXINT中斷信號,內核響應中斷并調用中斷服務子程序,將FIFO緩沖寄存器中的數據導入到緩存數組中,然后調用四元數解算子函數對采樣數據進行解算獲取姿態傳感的航偏角、俯仰、橫滾等姿態數據。最后將姿態數據通過串口發送給PC進行實時更新和顯示。
圖6為DSCs程序設計流程圖。程序采主體采用中斷結構設計,將時間軸分成若干片段,使DSCs時分多用,DSCs程序中主要包含:
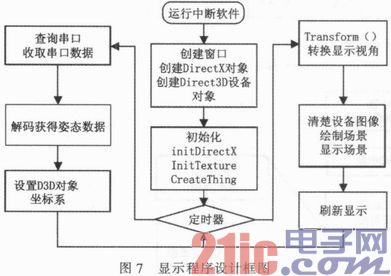

在Time0中斷服務子程序中,用CpuTimer0.InterruptCount作為時間片選標志位,通過對其去余操作,使DSCs在不同時間處理不同任務,這在時間邏輯性便于理解和掌握,使用switch—case語句調用過程函數;CpuTimer0.InterruptCount%5=1時,開啟串口接收中斷開啟,數據采用14級FIFO設置,當接收BUFF達到14級后,SCI模塊將產生FIFO中斷信號通過PIE模塊傳送給CPU,CPU保存寄存器值以及當前程序指針入棧,響應中斷服務子程序更新采樣數據緩存數組;同樣CpuTimer0.InterruptCount%5=2時,調用COT_IMU()(姿態解算子程序)獲取測量航偏角、橫滾角,俯仰角姿態數據:CpuTimer0.InterruptCount%5=4時,DSCs將會調用UPto_PC_SCIC()函數,把姿態數據編碼后發送給上位機,由上位機軟件對數據進行解碼和動態顯示。

圖7為PC上位機程序設計流程圖,程序采用以VB+Direct3D顯示技術,程序設計中為了讓下位機和上位機通信良好,上位機串口采用定時查詢方式。當時間達到條件后,系統將對接收數據進行解碼了校驗,將新的姿態數據賦予D3D對象,等待刷新時重繪圖像。
上代碼主要描述顯示刷新部分,通過調用timer控件更新視角速度可以方便變得調整顯示效果,設置其刷新時間通過改變Timer.Interval屬性中的值,縮短刷新時間會使得顯示效果更佳流暢,通過上位機程序將采樣的姿態數據記錄下來以便分析。
4 結果
經過測試和試驗,本文中所述姿態測量系統工作穩定,并且能夠獲取實時姿態信息,其姿態解算速率控制在400 Hz/s,顯示刷新速率控制在>60幀,串口速率設置在115 200 bps,傳輸誤碼率在0.02%,下位機上傳數據幀數在20幀/s,姿態監控范圍:俯仰角-90°至90°,航偏角-180至180°,橫滾角-180°至180°,姿態測量準確有效。
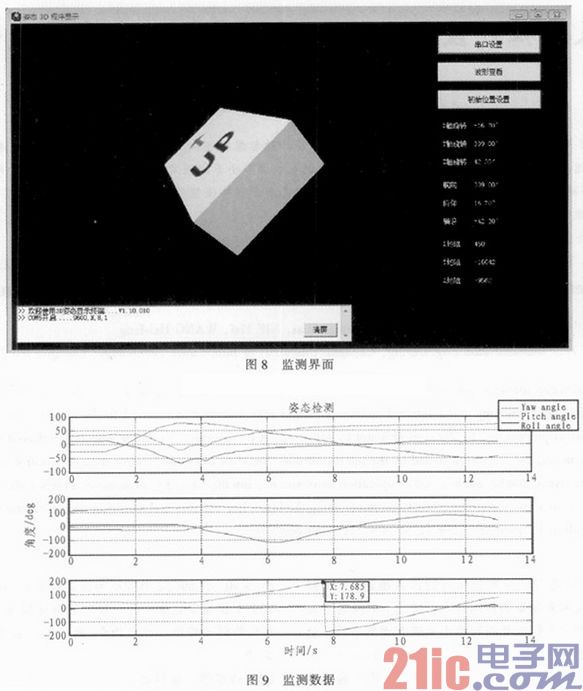
圖9中對姿態測量系統做了短時間測試獲得的監測數據。其中縱向坐標為角度信息,橫向坐標為時間信息,(上)(中)(下)三幅子圖為單姿態測試,圖中可以看出,在14s左右的測量過程中,姿態傳感器的響應速度非常靈敏,通過對(下)圖中180°到-180°跳變分析,系統響應速度在0.05s左右。由此系統在運行過程中姿態數據更新速度達到20fps,完全能夠滿足吊籃緩慢運動下對完成姿態測量的要求。
5 結束語
科學氣球吊籃在空中的姿態直接影響探測儀器工作,獲取科學氣球吊籃的姿態信息有助于對吊籃姿態的控制,也是作為姿態控制反饋中的重要環節,姿態測量系統的精度直接影響到姿態控制性能和精度。本文描述的姿態檢測系統硬件設計和軟件設計,利用TMS320F28335的優越性能,選用MPU6050和HMC5883測量元件實現系統硬件和軟件設計,采用D3D技術實現姿態實時監控并且達到預期效果。







評論