基于ARM和CPLD的無線內窺系統設計

引 言
本文引用地址:http://www.j9360.com/article/201610/308519.htm當前,醫用無線內窺鏡已有產品問世。以色列GI公司早在2001年5月即推出其M2A無線內窺鏡產品,并獲得美國FDA認證。GI公司生產的膠囊型內窺鏡長為26 mm,直徑為11mm,重3.5g;采用微功耗CMOS圖像傳感器,可觀察視角為14O°,可看清0.lmm左右的物體,采集速度為2幀/s。日本RF公司也于2001年底研制出NORIKA3膠囊型內窺鏡系統。該產品采用超小型CCD攝像頭,含有8個鏡頭,可觀察視角為360°,圖像幀率可達30幀 /s。“NORIKA3”利用位于藥丸內的轉子線圈與產生磁場的體外定子線圈形成馬達結構來實現藥丸系統姿態控制。RF公司在其網站上發布了產品的設計模型。此外,Gong和Park等人電獨立發表論文,描述了各自關于無線內窺鏡的設計。
目前國內尚無獨立制造該產品的能力,而國外的產品價格昂貴,因此,研發具有自主知識產權的無線內窺鏡產品具有重要意義。本文介紹無線內窺系統的系統結構,圖像壓縮標準JPEG-LS在ARM7平臺上的實現,以及實現過程中所采用的調試方法、優化方法。
1 系統組成與工作原理
1.1 內窺系統組成結構
如圖1所示,無線內窺鏡系統主要由主機和從機(無線內窺鏡)組成。從機由攝像頭采集原始圖像,經過壓縮處理,通過無線方式把壓縮后的圖像數據傳輸給主機;主機通過USB連接藍牙適配器接收壓縮圖像,并轉發給PC上的管理軟件,管理軟件將圖像解壓縮并顯示出來。
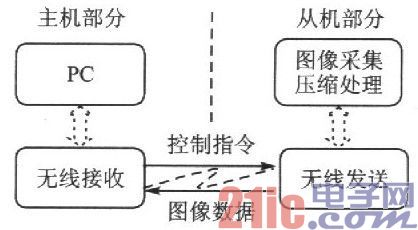
圖1 內窺系統結構框圖
1.2 無線內窺鏡組成結構
如圖2所示,無線內窺鏡采用CPLD芯片EPM7256-144,實現30萬像素CMOS攝像頭OV7660的圖像采集控制,以及數據和地址總線的切換。利用Atmel公司的ARM7芯片AT91R40008,實現JPEG-LS無損圖像壓縮與藍牙無線數據傳輸,實現溫度、壓力采集以及可控光源和系統控制。CPLD和ARM7之間的圖像數據交換通過8位數據總線實現,ARM7和CPLD之間的握手控制則通過I/O口線實現。由于圖像數據量較大,按 640×480分辨率、8位圖像的格式計算達幾十萬字節,故本系統外部擴展了2片上作在乒乓方式的512KB的SRAM作數據緩存。
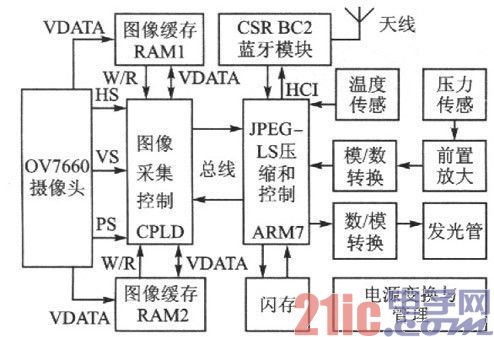
圖2 無線內窺鏡硬件結構框圖
1.3 系統工作原理
內窺系統可以實現圖像的連續采集以及溫度、濕度、照明亮度等的控制。其中圖像采集是系統的核心,其工作流程如下:
①默認情況下,系統工作在休眠狀態。
②工作人員通過PC管理軟件發送命令開始采集圖像,軟件通過USB接口把命令發送給藍牙適配器,然后發送給無線內窺鏡。
③內窺鏡接收到圖像采集命令后,ARM控制CPLD開始采集圖像數據。
④CPLD把采集到的一幀圖像數據寫入一塊SRAM中,把ARM的總線切換到該SRAM上,并通知ARM進行壓縮;同時CPLD往另一塊SRAM中繼續采集下一幀圖像,便于提高系統的吞吐率。
⑤ARM通過藍牙模塊返回響應命令,并返回采集JPEG-LS圖像的頭信息。
⑥PC管理軟件發送命令接收下一行壓縮圖像,ARM壓縮該行原始圖像,并發送壓縮數據;如果出錯,可以重新發送。重復本步驟可以獲取整幀壓縮圖像。
⑦PC軟件對壓縮圖像解碼并顯示,并提供其他附加功能,如圖像處理、保存等。
⑧重復步驟②~⑦,獲取下一幀壓縮圖像。
由上述流程可以看出,JPEG-LS壓縮以及無線信道傳輸決定整個系統的圖像傳輸速率。無線傳輸采用藍牙技術,其標稱空中速率為1 Mbps,不易提高;因此,系統設計的核心是JPEG-LS的編碼效率。
2 ARM與攝像頭接口設計
系統采用美國Omni Vision公司(簡稱為“OV公司”)開發的CMOS彩色圖像傳感器芯片。該芯片將CMOS光感應核與外圍支持電路集成在一起,具有可編程控制與視頻模/數混合輸出等功能。
(1)SSCB配置
為使芯片正常上作,需要通過SCCB總線來完成配置工作。SCCB總線是OV公司定義的一套串行總線標準,與I2C總線類似。配置時,主要是寫 OV7660的內部寄存器,使芯片輸出格式正確的彩色圖像數據。OV7660共有100個左右的寄存器可以配置,其數據手冊并未提供可用的配置值。系統調試過程中,通過各種測試,測出以下一系列配置數據,可使OV7660輸出顏色豐富的圖像,如表l所列。

(2)圖像數據訪問
AT91R40008不帶攝像頭接口,因此系統增加了一塊CPLD實現CMOS攝像頭的時序,如圖3所示。ARM只須訪問SRAM就可以訪問圖像數據。CPLD確保ARM的總線每次都只掛接一塊有完整圖像的SRAM。
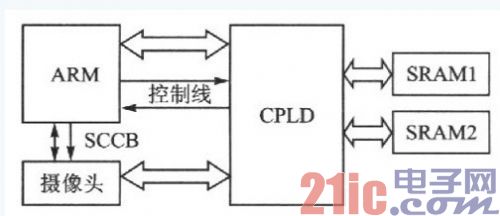
圖3 ARM與CPLD接口設計
3 ARM與藍牙接口設計
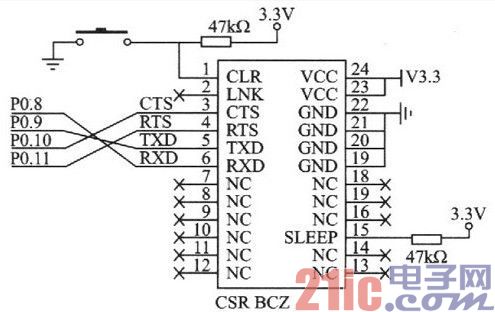
藍牙是無線數據和語音傳輸的開放式標準。它將各種通信設備、計算機及其終端設備、各種數字系統,甚至家用電器,采用無線方式連接起來。為了優化系統設計,我們采用性價比高的CSR BC2實現藍牙無線串口。CSRBC2是一款高度整合的模塊級藍牙芯片,主要包括:基帶控制器、2.4~2.5GHz的數字智能無線電和程序數據存儲器。通過該模塊,系統可以提供無線標準UART接口,支持多種波特率(如9.6 kbps、19.2 kbps、38.4 kbps、57.6kbps、115.2 1kbps、230.4 kbps、460.8 kbps、92l.6 kbps)。本系統經過測試發現,當速率為460.8 kbps時,藍牙芯片能夠正常工作;而在921.6kbps時,會有很高的誤碼率。藍牙模塊接口電路如圖4所示。
4 JPEG-LS圖像編碼
系統采集的原始圖像相關性大、數據量大,需要進行圖像壓縮。醫學圖像要求將圖像質量放在首位,因此必須采用無損壓縮算法。本系統采用靜態圖像無損壓縮技術JPEG-LS,它是目前無損壓縮算法中性能較好的一種算法。JPEG-LS是ISO/ITU組織提出的最新的連續靜態圖像近無損壓縮標準。該標準采用LOCO-I(Low Complexity Lossless Compression for Images)核心算法,建立簡單的上下文模型,在低復雜度的情況下實現了高壓縮率;同時,算法對圖像逐行進行壓縮,降低了系統對圖像緩沖區的要求。
4.1 JPEG-LS工作原理簡介
如圖5所示,JPEG-LS的編碼過程主要包括預測、上下文建模和熵編碼。核心算法LOCO-I采用鄰域非線性預測和Golomb熵編碼。
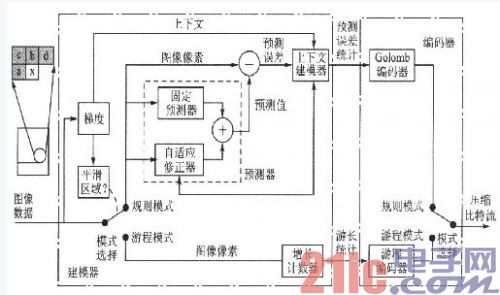
圖5 JPEG-LS編碼流程
上下文建模是JPEG-LS編碼的基礎,使用的建模方法是基于對上下文的認識。上下文首先根據圖5中a、b、c、d處像素值決定對x處像素足采用常規模式編碼還是采用游程模式編碼。當從上下文估計的連續像素在近似無失真編碼要求的容限內幾乎完全相同時,選擇游程模式;否則,選擇常規模式。
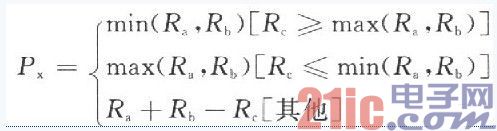
常規模式下首先完成預測。預測器對位于a、b、c等3個鄰近像素的重建組值Ra、Rb、Rc進行綜合,形成x像素的預測值Px,即:
預測誤差是x像索的實際值和預測值的差分。通過一個與上下文有關的項對預測誤差進行修正,以補償預測中的系統偏移。如果采用近無損編碼,則要對預測誤差進行量化,所允許的最大誤差用一個“NEAR參數表示。對已修正的預測誤差進行Golomb編碼。Golomb編碼相當于幾何分布下的 Huffman編碼。它依賴于上下文,而前面編碼的預測誤差也是以相同的上下文為基礎。
為進一步提高數據壓縮效率,JPEG-LS引入了游程模式。此時編碼過程直接跳過預測和誤差編碼程序:編碼器從x處開始對像素值和a處像素重建值相同的一系列連續像素進行計數,即統計游程的長度。當遇到一個具有不同值的像素或當前行的行尾時,游程終止。該游程長度經過一個專門的性能更好、更適用的 Golomb編碼擴展程序來編碼。
4.2 JPEG-LS的移植問題
本系統使用HP實驗室提供的開源JPEG-LS開發包。完整的JPEG-LS開發包支持多種顏色模型,如多平面壓縮、逐行或者逐點等壓縮方式。本系統考慮到ARM系統資源的限制,只裁減了其中的逐行單文件壓縮方式。原始開發包運行在Linux或者Windows平臺上,移植過程最主要的工作包括3 點。
①裁減不必要的功能,如原始開發包中對多圖像編碼的支持。
②針對系統設計移植后的接口,如本模塊移植后,只提供以下幾個接口:
jls_global_init,全局初始化函數,計算查詢表等,只需要啟動時調用一次;
jls_image_init,每幀圖像開始壓縮時都要調用一次的初始化;
jls_encode_one_line,壓縮一行圖像。
③對原開發包中使用的動態內存分配需要移植,解決的方案有2個:
開發一個簡單的內存管理模塊;
手動分配內存。
考慮到源碼包中使用的動態內存不多,系統采用第2種方案。在移植過程中,建議先在PC上分配好一大塊內存,然后,給開發包中需要分配的地方手動分配。在PC上調試通過之后,就可以直接在ARM上面使用了。
5 調試及優化方法
5.1調試方法
嵌入式系統的調試是一個很繁瑣而復雜的過程。在調試之前劃分好模塊,可以大大提高調試效率;另外為了調試,還需要添加一些計劃項目之外的調試工具。
本系統的調試工作分為3個部分。
(1)藍牙無線鏈路層調試
藍牙無線鏈路層的調試可以直接借助PC上很多現有的串口工具來實現。
(2)CMOS攝像頭調試
CMOS攝像頭的調試有兩個部分:SCCB配置時序、RGB圖像數據時序。
一般的處理器都不帶SCCB接口,因此要用處理器的口線模擬SCCB時序。此時的調試一般都是通過示波器觀察模擬的時序,看足否符合芯片手冊上的要求。為了驗證是否正確,一般可先讀一個指定的寄存器(這些寄存器都有出廠默認值);然后寫一個數據,讀取出來驗證是否吻合。
RGB圖像數據時序由CPLD產生,此時的調試需要ARM來配合。本系統在調試時,在PC上編寫了一個簡單的串口接收程序,ARM把SRAM中的圖像數據通過串口發送給該PC,PC上的程序把這些原始的RGB數據插值并顯示出來,從而可以得知CPLD的時序是否正確。當然,調試時序時,示波器仍然是必不可少的工具。
(3)JPEG-LS算法調試
JPEG-LS算法的調試分為兩個步驟:PC上的算法驗證和目標板上的調試。
PC上的算法驗證使用VC6.O模擬目標板上的運行環境,測試目標板上的各個功能接口。本部分的驗證代碼可供下載。
目標板上調試時,還是要借助串口,把壓縮的圖像和原始圖像通過串口發送至PC。Pc上的JPEG-LS解碼程序解碼壓縮圖像,然后與原始圖像對比,從而找出算法中的錯誤。
5.2 優化方法
為提高圖像傳輸的幀率,本系統主要采用了2種優化方法。
(1)硬件優化
硬件優化主要是在CPLD采集數據時,使用雙緩沖,使得連續采集下一幀圖像和傳輸上一幀圖像可以并行,從而提高系統的吞吐率。
(2)軟件優化
軟件優化的作用在本系統的調試過程中效果明顯;本系統的第一個版本,圖像采集速率僅為3 s/幀;通過軟件優化后,達到了最終的O.3 s/幀。其優化如下:
①循環外移,避免在循環中重復運算;
②頻繁使用的變量申明為寄存器變量;
③把所有的JPEG-LS編碼函數代碼拷貝到RAM中執行。
默認情況下,所有的代碼都存放在Flash中。ARM運行時,從Flash中讀取指令并且執行。眾所周知,Flash的訪問速度相對RAM而言,相差一個數量級,因此,如果把關鍵代碼放在RAM中,執行速率將會大大提高。而AT9lR40008內部自帶512 KB的RAM,足夠本系統使用,因此,這個方法可行。
解的方法有兩個,一是寫一個啟動程序,在啟動時,把系統所有的代碼都拷貝到RAM中,這樣系統速度會提高。然而,該方法實現起來較麻煩,且如果程序擴展,可能會超過RAM的512 KB限制。因此,本系統采用另外一個簡單方法。采用IAR Embedded Workbench開發環境,通過閱讀其編譯器手冊發現,在函數之前添加一個__ramfunc偽指令,那么鏈接器在生成啟動代碼時,會將該函數拷貝到 RAM中,從而提高運行效率。其使用例子如下:
ramfunc void encode_oneline(vcrid)
通過使用該方法,系統的運行效率提高了約lO倍。
結語
本系統以ARM為核心,實現了JPEG-LS無損圖像壓縮算法,并日結合CPLD實現了CMOS攝像頭的時序控制。通過藍牙傳輸,實現了數字化的無線內窺系統。
本系統具有良好的擴充性,可以使得系統更加微型化。首先,如果采用CSR公司更新的BC3系列芯片,則將融合ARM核以及藍牙功能,可以更加減小內窺鏡的體積。最重要的是,如果發展自主產權的內窺鏡芯片,那么以現有的SOPC技術,可以將ARM核、CPLD邏輯門以及藍牙通信功能集成在一起,形成無線內窺鏡的集成解決方案,從而使其產業化成為可能。
本系統在實現過程中,完成了一系列的調試工具,積累了調試以及優化經驗。我國現有的醫療設備開發技術相對比較落后,在此分享,希望對同類型的產品設計以及芯片生產能有一些參考價值。








評論