基于ARM和WINCE的便攜式差分GPS導(dǎo)航定位系統(tǒng)設(shè)計及

摘要:以ARM9微處理器S3C2440A為硬件平臺核心,WindowsCE嵌入式操作系統(tǒng)為軟件平臺,構(gòu)建了微型化、便攜的差分GPS導(dǎo)航定位系統(tǒng)。在Visual Studio2008開發(fā)環(huán)境中采用MFC編程技術(shù),編寫導(dǎo)航定位軟件,通過RS232串口讀取差分GPS接收設(shè)備輸出的$GPRMC信息,解析后用于顯示和導(dǎo)航參數(shù)計算。系統(tǒng)在開闊場地進行了實驗,運行正常并得到了精度良好的導(dǎo)航定位結(jié)果,具有重要的實用價值。
本文引用地址:http://www.j9360.com/article/201610/305935.htm差分GPS可提供連續(xù)、高精度、實時的時間基準(zhǔn)、位置、速度、整周模糊度等數(shù)據(jù),被廣泛應(yīng)用于各項海上試驗中。在以小型船舶如小艇、漁船等為平臺進行某些試驗科目時,由于其空間狹小,防護性較差,使用常規(guī)差分GPS接收機加顯控筆記本存在架設(shè)不便、供電困難、濺入海水等問題,而使用手持GPS接收機又存在精度低、穩(wěn)定性差、屏幕小、導(dǎo)航不便等問題。嵌入式系統(tǒng)以其低功耗、小體積、高穩(wěn)定性和便攜等優(yōu)勢,在GPS的應(yīng)用中占據(jù)重要的位置。文中研究基于嵌入式微處理器系統(tǒng)和WindowsCE5.0的便攜式差分GPS導(dǎo)航定位系統(tǒng)。
1 系統(tǒng)的硬件設(shè)計
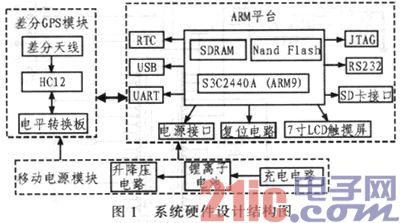
設(shè)計的導(dǎo)航定位系統(tǒng)硬件主要由3部分組成:ARM平臺,差分GPS模塊,移動電源模塊。ARM平臺主要負(fù)責(zé)整個系統(tǒng)的運行,差分GPS模塊負(fù)責(zé)GPS定位信息的接收和發(fā)送,移動電源模塊負(fù)責(zé)分別給ARM平臺和差分GPS模塊供電,硬件構(gòu)成如圖1所示。
1.1 ARM平臺
由基于ARM920T內(nèi)核的32位高性能嵌入式微處理器S3C2440A、64MB的SDRAM、64MB的Nand Flash的核心板和外圍擴展接口資源7寸LCD觸摸屏、USB口、JTAG接口、電源接口、復(fù)位電路、RTC電路、SD卡接口、1個RS232串口、1個UART接口(3個擴展串口)組成,SDRAM存儲器用于運
行系統(tǒng)主程序,Nand Flash存儲器具有掉電保護功能,用于存儲操作系統(tǒng)內(nèi)核、Boofloader的啟動代碼和開發(fā)程序,RS232串口COM1可用于和PC機通信,擴展串口COM0為3.3 VCMOS電平,用于采集差分GPS模塊輸出的數(shù)據(jù)信息。選用群創(chuàng)7寸TFT電阻式觸摸屏,用于人機交互和顯示導(dǎo)航軟件信息,USB口用于下載WINCE內(nèi)核文件及與軟件開發(fā)主機進行數(shù)據(jù)交互,JTAG調(diào)試接口用于硬件調(diào)試和燒載Bootloader。
1.2 差分GPS模塊
由加拿大Hemisphere公司的Crescent GPS OEM板HC12、電平轉(zhuǎn)換板和差分天線組成。新月HC12是一款高性能單頻12通道接收機(其中有2個通道專用于跟蹤SBAS信號),體積小、功耗低,通過接收SBAS或外部差分信號,可提供亞米級定位精度,數(shù)據(jù)輸出采用NMEA-0183標(biāo)準(zhǔn),輸出速率可高達20Hz.此接收機還可以輸出原始觀測數(shù)據(jù),用于后處理解算。在差分信號暫時失鎖情況下,其專利的COAST技術(shù)可以利用已收到的差分?jǐn)?shù)據(jù)保持30分鐘的穩(wěn)定差分級定位精度。
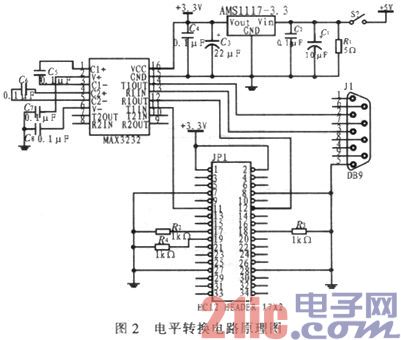
新月HC12有3個全雙工3.3 V CMOS電平串口(A,B,C),COM A直接與ARM平臺COM2相連,用于進行HC12參數(shù)設(shè)置或輸出定位數(shù)據(jù)信息,COM B電平轉(zhuǎn)換為RS232電平后可接入PC機,同樣可用于HC12參數(shù)設(shè)置或輸出定位數(shù)據(jù)信息,COM C串口備用。HC12輸入電壓為3.3 V,而電源模塊輸出電壓為5 V,需要進行電平轉(zhuǎn)換。電源電壓轉(zhuǎn)換選用AMS1117-3.3芯片,串口電平轉(zhuǎn)換采用MAX3232芯片,HC12通過一34Pin(17pin X2)的轉(zhuǎn)接頭實現(xiàn)電源供電以及外部通信,電平轉(zhuǎn)換電路如圖2所示。
差分天線選用Hemisphere公司生產(chǎn)的A30天線,該天線可接收GPS、SBAS和Beacon信號,擁有多個波段接收能力,具有出色的緩解抑制噪聲性能,在高電氣噪聲和其它被干擾環(huán)境下都能夠保持很好的GPS信號接收,適合使用在高精密的GPS應(yīng)用中。
1.3 移動電源模塊
由8塊2400mAh三星18650圓柱形鋰離子電芯和5V升壓、保護、充電一體板組成,兩個輸出端口分別給ARM平臺和差分GPS模塊供電,輸出電壓5 V、電流1 A,其供電時間大于6小時。
2 系統(tǒng)軟件設(shè)計
系統(tǒng)的軟件是基于WINCE5.0嵌入式操作系統(tǒng)設(shè)計的,WINCE是一個多任務(wù)、完全搶占式的32位嵌入式操作系統(tǒng),具有操作界面良好、實時性較高、占用資源少、通信能力強的特點,支持WINCE MFC、ATL、WINCE API和一些附加的編程接口及各種通信技術(shù),可充分滿足本軟件的技術(shù)需求。開發(fā)工具采用微軟的Visual Studio2008,安裝完WINCE5.0的SDK(Software Development Kit,軟件開發(fā)工具包)后,創(chuàng)建智能設(shè)備MFC工程,即可開始軟件編寫。SDK可以使用標(biāo)準(zhǔn)的,也可自行編譯生成。
2.1 軟件界面
圖3所示為本系統(tǒng)接收GPS導(dǎo)航數(shù)據(jù)后處理并顯示的軟件界面。打開界面后,在“串口通信”區(qū)進行串口“端口號”和“波特率”設(shè)置,點擊“打開”按鈕,下方“收到”的編輯框就會不斷地顯示從差分GPS模塊輸出的NMEA格式導(dǎo)航數(shù)據(jù),勾選“保存數(shù)據(jù)”可將輸出的導(dǎo)航數(shù)據(jù)以文本格式保存,用于事后數(shù)據(jù)處理分析,在“發(fā)送”編輯框可借助NMEA0183指令進行HC12參數(shù)設(shè)置;在“定位信息”區(qū)有經(jīng)緯度、航向、速度、GPS時間等參數(shù)實時顯示,點擊“清除軌跡”可將海圖顯示區(qū)歷史軌跡清除;“導(dǎo)航信息”區(qū)可進行“目標(biāo)點”添加、修改、刪除、畫圓、航線等設(shè)置,實時顯示本船距目標(biāo)點位置、方位、偏離等參數(shù):在“海圖操作”區(qū)可進行放大、縮小、本艦居中、目標(biāo)居中、標(biāo)記當(dāng)前點位等操作,勾選“平移海圖”后點按左側(cè)海圖區(qū)不動可進行上下左右移動;左側(cè)藍色區(qū)域為海圖顯示區(qū),可直觀顯示本船與各目標(biāo)點位置關(guān)系、試驗態(tài)勢等。










評論