基于ARM和WINCE的便攜式差分GPS導航定位系統設計及

2.2 設置HC12參數
本文引用地址:http://www.j9360.com/article/201610/305935.htm通過串口建立差分GPS模塊與ARM或PC機的連接,借助NMEA0183指令,通過任意一串口均可以設置HC12。可用開發軟件串口通信區“發送”命令按鈕或串口助手軟件(WINCE或WINXP均可)進行通信,首先設置接收機應用模式為SBAS,再設置串口通信波特率、串口輸出的NMEA語句及輸出速率,最后設置最大差分齡期和衛星仰角。
差分GPS模塊串行通訊參數為:波特率=19200,數據位=8位,停止位=1位,無奇偶校驗。通過串口建立ARM和GPS的連接,GPS加電后便自動搜索衛星,并通過串口以每秒1次的頻率向ARM發送GPRMC格式的定位信息,在定位信息有效后ARM便可以提取所需要的定位信息。
2.3 讀取串口
獲取GPS導航數據實際上就是通過串口讀取HC12輸出的NMEA格式數據的過程,下面介紹WINCE下讀取串口程序的開發過程。
2.3.1 打開串口
點擊“打開”按鈕,進入此按鈕的消息響應函數,函數中執行打開串口和串口參數配置等操作。首先調用CreateFile()函數打開指定的端口,接著對串口進行參數配置,包括波特率、數據位、停止位、奇偶校驗等。參數設置過程為:先調用GetCommState()獲取串口的當前配置,得到結構體DCB(Device Control Block,設備控制塊)的指針,通過它給DCB結構體賦值,然后傳給SetCommState()函數對串口進行配置。
最后設置串口的超時參數,設置方法與上述參數設置類似,先通過GetCommTimeouts()得到一個結構體指針,賦值后傳給Set Comm Time outs()進行設置。
2.3.2 接收數據
串口打開后,自動開始接收,函數中調用了CreateThread()開辟了一個線程,用于接收串口數據。由于接受過程需要調用WaitCommEven()函數來不停地等待數據到來事件,會致使程序無法響應其他操作,因此采用開辟線程的辦法來防止信息擁堵。
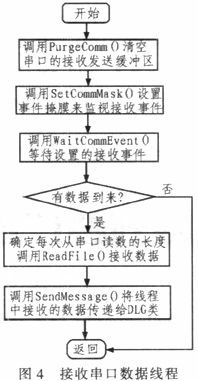
圖4所示為接收串口數據的線程中執行的操作流程。程序實現了串口數據的接收,并把接收到的數據傳遞給Dig類,用于后期進行定位信息提取及顯示等操作。
2.4 提取定位數據
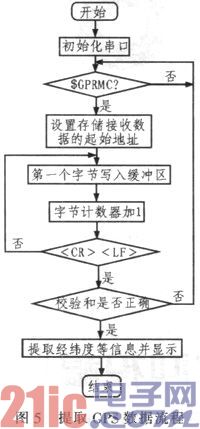
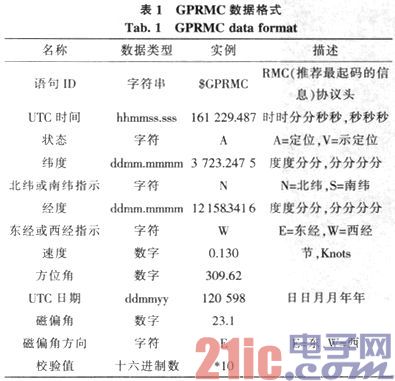
NMEA-0183通信標準的輸出數據采用的是ASCⅡ碼,主要有GGA、GLL、GSA、GSV、RMC、VCT等不同的結構,每種類型的幀均是以“$”開頭,然后是兩個字母的“識別符”和3個字母的“語句名”組成ID信息頭,接著就是以逗號分割的數據體,末尾為校驗和,以回車換行符結束。本設計只關心日期、時間、經緯度、地面速度等,選用GPRMC語句,表1中對該語句結構作了詳細說明,按圖5所示的流程即可完成GPS數據的提取。注意在編寫程序中不要出現m_strRecv[i+k](k>0)這樣的表達式,例如以(m_strDataReceived[i]==‘$’m_strDataReceived[i+3]==‘R’)為判斷條件來提取ID頭,容易造成超出數組元素個數的錯誤。
3 系統實驗及精度分析
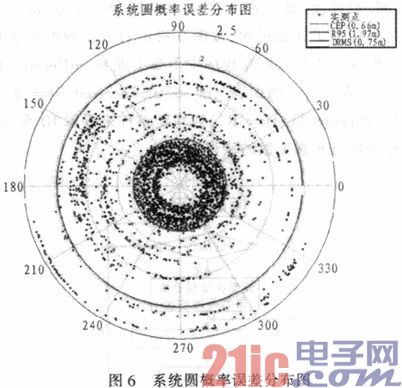
實驗地點選在運動場場開闊處,先采用靜態內符合法進行精度測試。連接差分GPS天線,給系統上電,運行開發軟件,設置好串口參數,打開串口COM2,待差分GPS模塊進入穩定差分定位后開始保存數據,采集數據約3 000組,用MATLAB處理采集數據,結果如圖6所示。
導航定位等功能測試:手持該系統進行直線和圓形運動,觀察海圖區域航跡向軌跡形狀;設定1個目標點,畫半徑為200米的圓并設置航線,分別按直線和曲線前進,觀察距離、偏離、方位等參數變化;對海圖進行放大、縮小和平移,分別點選本艦居中和目標居中,觀察海圖顯示變化。
測試表明,終端軟件能平穩地運行在嵌入式WINCE5.0系統上,操作界面簡潔、直觀、實用、功能全面,具有良好的實時性和準確性,系統定位精度(2DRMS)優于1 m。
4 結束語
文中基于ARM硬件平臺,以WINCE為嵌入式操作系統,在Visual Studio2008下開發了串口通信導航數據軟件,通過串行接口實現差分GPS模塊與ARM之間的通信,構建了一個體積小、功耗低、功能全面的便攜式差分GPS導航定位系統,并給出了詳細的硬件和軟件設計實現。實驗表明:該系統能實時顯示精度較高、持久有效的GPS定位數據,具有重要的實用價值和一定的參考意義。









評論