基于52單片機的智能小車的設計與制作

引言:
本文引用地址:http://www.j9360.com/article/201609/297206.htm隨著電子技術、計算機技術和制造技術的飛速發展,消費產品呈現光、機、電一體化、智能化、小型化的趨勢。各種智能化小車在市場玩具中占一個很大的比例。傳統玩具的市場比重正在逐步縮水,高科技含量的電子玩具蒸蒸日上,日益成為電子玩具行業的發展主流。智能控制與傳統控制有機的結合起來,取長補短,提高整體優勢,更好地滿足人們的需求。智能技術必將迎來它的發展新時代,因此,我們設計了這款智能小車。
1、機械部分總方案
在小車的機械要求保證預定的功能的前提下,我們還考慮到小車的經濟、可靠、外形美觀,性能好、富有時代特點。
轉向機構與驅動系統的設計是至關重要的。為了保證小車轉向時精確、靈敏、可靠性高且在轉向時小車前輪純滾動而無滑動,利用阿克曼原理及解析算法,設計出等腰梯形的雙搖桿機構,小車的完美轉向變為現實。
1.1、機械控制原理
在以單片機為核心的控制下,直流減速雙電機驅動小車后輪,舵機通過等腰梯形雙搖桿機構控制小車轉向。
如圖一所示:
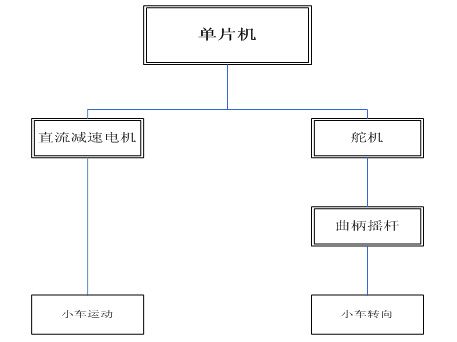
圖一:機械控制原理圖
1.2、阿克曼原理:
如圖二所示:
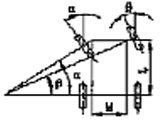
圖二:阿克曼原理示意圖
轉彎時因輪距與軸距的關系,兩前輪轉角不同,內側輪轉向角比外側轉向角大,要使車輛轉向順利,車輪在地面純滾動而不產生滑移,必須使所有車輪都繞同一瞬時轉動中心滾動,兩前輪轉軸延長線與后輪輪軸延長線交與一點,這是阿克曼原理。此時,轉向的內外輪轉角關系為 :
ctgβ-ctgα=M/L
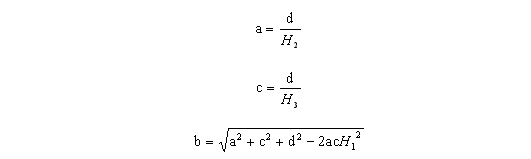
由解析法計算等腰梯形雙搖桿機構連桿、連架桿長度:
已知連架桿AB的三個位置與連架桿CD的三個位置相對應,即三組對應位置為
建立直角坐標系,如圖所示,和分別為AB和CD的初始角,各桿長度分別用矢量和表示。將各矢量分別在軸和軸投影,得到投影方程
在上述方程中消去并整理,可得與之間的函數關系
在上式中令:

通過化簡可得到:
將兩連架桿對應的參數分別代入到方程得到,再根據其他條件選定機架長度,據此,可求出其余桿的長度
有了小車的驅動結構和轉向結構,將小車其他零件裝配好,可得到小車的裝配圖,如圖三:
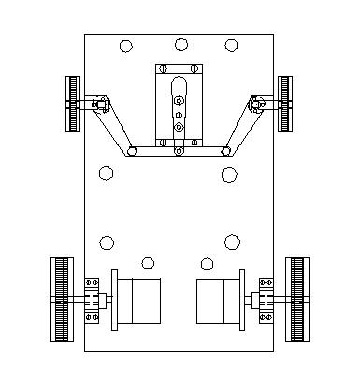
圖三:小車整體裝配圖
2、電路部分總體方案
智能小車采用52單片機作為控制器,通過控制電路控制舵機轉向和直流減速電機的轉速、轉動方向,使小車能夠走直線和轉彎。運用集成的紅外對管GP2A25來巡線,安裝在車子前方,并排安裝三個,采集路面信號反饋給單片機,再由單片機控制電機的轉動和方向的調整,從而達到巡線的效果。整個小車還采用金屬傳感器來識別小車巡線上的金屬。
整個小車的結構圖如圖四所示:
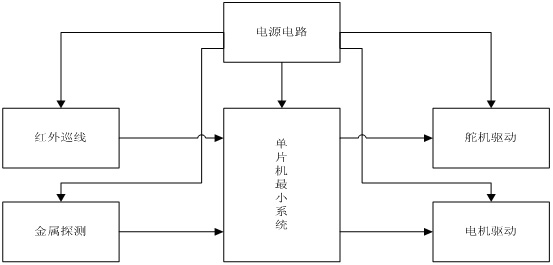
圖四:電路部分總方案圖
下面分別討論以上五個模塊。
2.1、單片機最小系統
單片機要能夠工作,必須加上晶振和復位電路,如果用到P0口的話還得給其加上上拉電阻,保證通電后P0為高電平。另外還得有給單片機燒寫程序的下載器,這個老師已給。單片機是此電路的核心部分。設計采用的52單片機,其工作電壓為5V(20引腳接5V,40引腳接地)。單片機根據程序輸出邏輯電壓從而完成控制作用。本設計使用單片機的P0.5到P0.7引腳來作為紅外巡線的反饋控制引腳。P0.4為金屬傳感器的控制端口,只可惜時間上不允許我們把金屬探測的功能做出來。P2.0到P2.3,為直流減速電機的控制線接口,能控制左右電機的正轉、反轉和停轉;P2.4和P2.5為電機的使能端接口,分別控制左右電機的轉速。P2.6為舵機的控制線接口,通過控制占空比來控制舵機的轉向及轉角大小。電路圖如圖五:
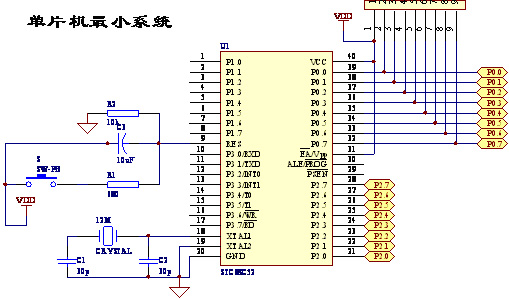
圖五:單片機最小系統
2.2、電源模塊
首先單片機用到的是5V的數字電,而電機驅動要用到L298的芯片,這種芯片用到12V的模擬電壓,驅動舵機用到的又是5V的模擬電壓。這就用到了三種電壓。我手上有一塊12V的電池,能夠供給L298作為電機驅動的電源。然后我選擇L7805來得到5V的模擬電壓。最后供給單片機的也是此電壓,然后把數字地和模擬地共地,從而得到了整個智能小車的總體供電系統。但是由于數字電和模擬電共在一起,干擾很大,系統的效果并不是很好。電路圖如圖六:
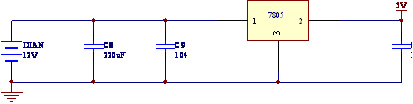
圖六:電源模塊電路圖


評論