智能藍牙壁障小車系統電路設計

現在,隨著科技的快速發展,國內外對小型智能系統的應用越來越廣泛,種類也越來越多。本設計就是結合有關科研項目而確定的設計類課題,所設計的智能小車應能夠實現遠程遙控的功能。智能小車控制系統采用一片STC89C51單片機作為本控制系統的主控芯片,硬件包括以下幾個模塊:驅動電機模塊、單片機控制模塊、藍牙模塊、電源模塊。本設計采用了STC89C51單片機為智能小車核心控制部分,通過查詢方式實現對小車的智能控制。小車由主控制板、電源系統和車身四部分組成。主控制系統由主控CPU電路、直流電機驅動電路等組成;直流電機驅動采用PWM調制技術,可靈活方便地對車速、行進方向進行控制。
本文引用地址:http://www.j9360.com/article/201710/369429.htm 
平臺選型說明
單片機開發板,以STC15F2K61S2芯片為控制核心
設計說明
經過反復論證,我們最終確定了如下方案:
1.車體是購買專用電動車。2.采用STC15單片機作為控制核心。3.采用12V鋰電池供電。4. 采用藍牙模塊作為下位機上的藍牙從機。
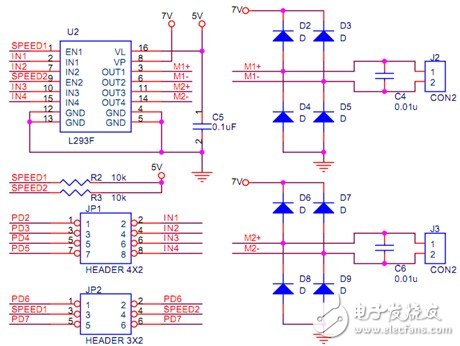
電路原理:本系統利用單片機STC89C51單片機作為本系統的主控模塊,我們采用android手機控制下車上的藍牙從機,由單片機對傳感器識別到的信號加以分析和判斷,并通過對直流電機的控制來實現方向變換。小車原理圖如下圖所示,電機通過L293F芯片控制轉動的方向與速度。其中,SPEED1和SPEED2兩個端口通過PWM調節控制兩個電機的轉速,IN1和IN2控制左側電機轉動的方向,IN3和IN4控制右側電機轉動的方向。通過對這6個端口的控制,使小車能夠按照預定的軌跡行進。
小車車體結構好,完全自主設計,小車采用兩層結構,分放不同模塊的元件,調試過程和修改過程相對簡單。本設計通過采用STC89C51單片機為控制核心,實現對小車的智能控制。該控制系統不僅在智能小車中有很強的實用價值,在汽車應用、智能機器人等方面都有很強的實用價值,尤其是在機器人研究方面具有很好的發展前景。所以本設計與實際相聯系,具有重要的現實意義。











評論