基于FPGA的增量型光電編碼器抗抖動二倍頻電路設計

1 增量型編碼器的工作原理
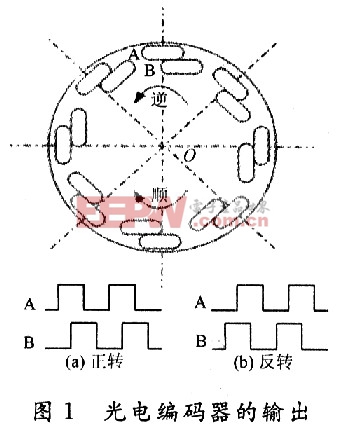
增量型編碼器是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳感器,它由光柵盤和光電檢測裝置組成。光柵盤是在一定直徑的圓板上等分地開通若干個長方形孔,見圖1。由于光電碼盤與電動機同軸,電動機旋轉時,光柵盤與電動機同速旋轉,經發光二極管等電子元件組成的檢測裝置檢測輸出若干脈沖信號,編碼盤上涂有兩道相差90°黑自相同的柵欄,分別稱之為A道和B道。其輸出脈沖也是相差90°。當編碼器正向旋轉時,A相比B相超前90°,當編碼器反向旋轉時,A相比B相滯后90°。正常情況下編碼器的輸出波形如圖1所示。
2 誤碼脈沖產生的原因及其濾除方法
2.1 誤碼脈沖產生的原因
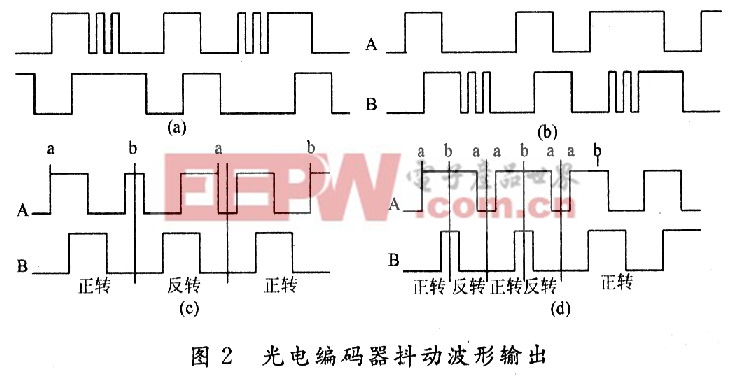
為了說明誤碼脈沖的存在性,將編碼器碼盤局部放大。圖1中點0是編碼器旋轉軸的中心,圓角矩形代表碼盤上A列和B列透光狹縫。假定編碼器一相信號處于某種狀態,而另一相信號處于高低電平跳變的交界狀態,則編碼器的誤碼脈沖如圖2(a),圖2(b)所示。由于電機的旋轉或機械設備的振動,會使編碼器輸出脈沖抖動,從而引起誤計數。它一方面表現為在透光窗口附近的抖動,引起的干擾脈沖,如圖2(a)給出了A相脈沖信號在上升沿和下降沿發生抖動輸出的時序波形,圖2(b)給出了B相脈沖信號在上升沿和下降沿發生抖動輸出的時序波形;另一方面表現為在編碼器的某點附近前后振動,引起干擾脈沖。如圖2(c),圖2(d)給出了信號在編碼器b點前后抖動的時序波形。編碼器從a點正轉到b點,然后編碼器反轉到a點,又正轉到b點,兩個b點之間的脈沖數為干擾脈沖。








評論