基于混沌蟻群的神經網絡速度辨識器研究

3.2仿真實驗
在MATLAB/Simulink仿真環境下建立直接轉矩控制系統的仿真平臺時,系統采樣周期可設定為0.1 ms,異步感應電動機的其它各參數為:額定功率PN=15 kW,額定電壓VN=380 V,額定頻率fN=50 Hz,定子電阻Rs=0.435 Ω,轉子電阻Rr=0.816 Ω,定子電感Ls=0.002H,轉子電感Lr=0.002H,定轉子互感Lm=0.06931H,極對數p=2,轉動慣量J=0.0918 kg.m2。設定電機轉速ω=20 rad/s時,采取1000組數據作為訓練樣本,5000組數據作為驗證樣本,最大訓練次數設定為2000次,最小容許誤差設定為0.001。
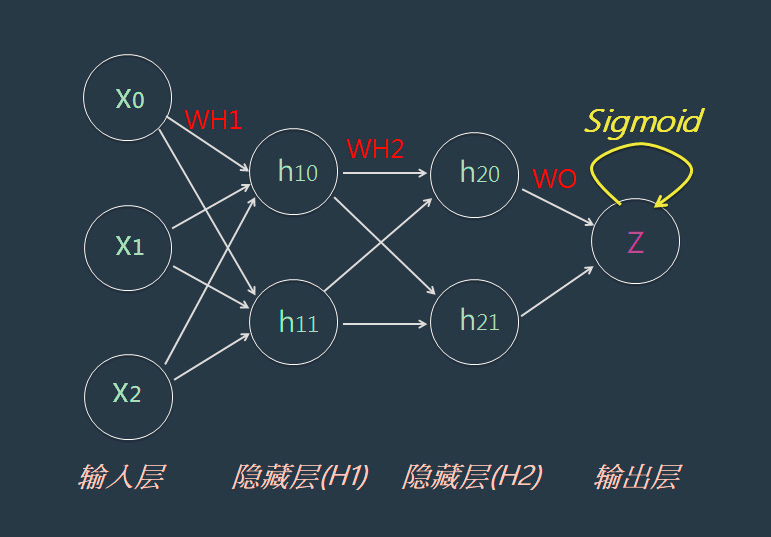
學習網絡的隱含層節點個數經多次訓練后確定為k1=11和k2=6,設n為輸入節點個數。混沌變量個數m為神經網絡所有權值、閾值的總和,m=156,蟻群種群數M=30,p=0.8,Q=50。其算法訓練誤差比較如表1所列。

從表1可以看出,傳統的BP算法優化神經網絡的最小適應度收斂十分緩慢,并且誤差較大。而混沌蟻群算法優化BP神經網絡誤差更小,精度更高,其收斂性要遠遠優于傳統的BP算法。
表2所列是由實驗仿真結果中分別提取出的神經網絡速度辨識器的動態性能指標。可以看出,混沌蟻群優化的神經網絡較之傳統BP算法的動態性能有了很大改進。

4 結束語
本文構造了一種基于混沌蟻群算法的BP神經網絡模型,并將其應用到直接轉矩控制系統中的轉速辨識器中,從而顯示出其辨識非線性函數的優越性能以及速度快、精度高的特點。仿真結果表明,用混沌蟻群優化的BP神經網絡速度辨識器是可行的,而且具有較強的速度跟蹤精度,可實現直接轉矩控制系統的無速度傳感器控制,而且系統具有良好的動、靜態性能。








評論