基于超聲波檢測的倒車雷達設計

倒車雷達(Car Reversing Aid Systems)的全稱是“倒車防撞雷達”,也稱“泊車輔助裝置”,是汽車泊車安全輔助裝置,能以聲音或者更為直觀的顯示告知駕駛員周圍障礙物的情況,解除了駕駛員泊車和起動車輛時前后左右探視所引起的困擾,并幫助駕駛員掃除了視野死角和視線模糊的缺陷,提高了安全性。
系統工作原理
倒車雷達只需要在汽車倒車時工作,為駕駛員提供汽車后方的信息。由于倒車時汽車的行駛速度較慢,和聲速相比可以認為汽車是靜止的,因此在系統中可以忽略多普勒效應的影響。在許多測距方法中,脈沖測距法只需要測量超聲波在測量點與目標間的往返時間,實現簡單,因此本系統采用了這種方法。
如圖1所示,駕駛員將手柄轉到倒車檔后,系統自動啟動,超聲波發送模塊向后發射40kHz的超聲波信號,經障礙物反射,由超聲波接收模塊收集,進行放大和比較,單片機AT89C2051將此信號送入顯示模塊,同時觸發語音電路,發出同步語音提示,當與障礙物距離小于1m、0.5m、0.25m時,發出不同的報警聲,提醒駕駛員停車。

圖1 系統工作原理框圖

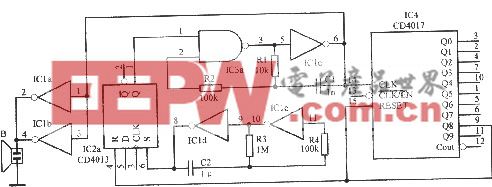
圖2 超聲波發送模塊電路
硬件設計
1 超聲波發送模塊設計
超聲波發送器包括超聲波產生電路和超聲波發射控制電路兩個部分,超聲波探頭(又稱“超聲波換能器”)選用CSB40T,可采用軟件發生法和硬件發生法產生超聲波。前者利用軟件產生40kHz的超聲波信號,通過輸出引腳輸入至驅動器,經驅動器驅動后推動探頭產生超聲波。這種方法的特點是充分利用軟件,靈活性好,但需要設計一個驅動電流在100mA以上的驅動電路。第二種方法是利用超聲波專用發生電路或通用發生電路產生超聲波信號,并直接驅動換能器產生超聲波。這種方法的優點是無須驅動電路,但缺乏靈活性。
本設計采用第一種方法產生超聲波,電路設計如圖2所示。40kHz的超聲波是利用555時基電路振蕩產生的。其振蕩頻率計算式為f=1.43/((R 9+2





評論