基于RBF神經網絡的控制系統傳感器故障診斷方法

引 言
傳感器是現行研究的壓鑄機實時檢測與控制系統的關鍵部件,系統利用傳感器對壓鑄機的各重要電控參數 (如:合型力、油壓、壓射速度、模具溫度等)進行檢測,并進行準確控制。這一過程中,各傳感器輸出信號的質量尤為重要,其優劣程度直接影響壓鑄機控制系統分析、處理數據的準確性,最終影響壓鑄件產品質量的優劣。由于大型壓鑄機生產環境較為惡劣,長期的高溫、高壓、高粉塵及來自周邊器械的電磁干擾等因素的存在,不可避免地會造成傳感器軟硬故障的發生,有故障的傳感器所發出的錯誤信號,會使整個壓鑄機控制系統分析、處理和控制功能紊亂,造成系統無法正常運行,帶來無法估計的生產安全隱患及嚴重的后果。因此,對壓鑄機控制系統中傳感器故障診斷方法的研究具有重要的意義。
人工神經網絡(神經網絡)是傳感器故障診斷的方法之一。神經網絡是有大量人工神經元相互連接而構成的網絡。它以分布的方式存儲信息,利用網絡拓撲結構和權值分布實現非線性的映射,并利用全局并行處理實現從輸入空間到輸出空間的非線性信息變換。對于特定問題適當建立神經網絡診斷系統,可以從其輸入數據(代表故障癥狀)直接推出輸出數據(代表故障原因),從而實現非線性信息變換。層狀結構的神經網絡輸入層、輸出層及介于二者之間的隱含層構成。依據用于輸入層到輸出層之間計算的傳遞函數不同,提出一種基于徑向基函數RBF神經網絡的傳感器故障診斷策略。
1 RBF神經網絡的模型
徑向基函數神經網絡(RBFNN)是一種新型神經網絡,屬于多層前饋網絡,即前后相連的兩層之間神經元相互連接,在各神經元之間沒有反饋。RBFNN的三層結構與傳統的BP網絡結構相同,由輸入層、隱含層和輸出層構成,其結構見圖1。其中,用隱含層和輸出層的節點計算的功能節點稱計算單元。
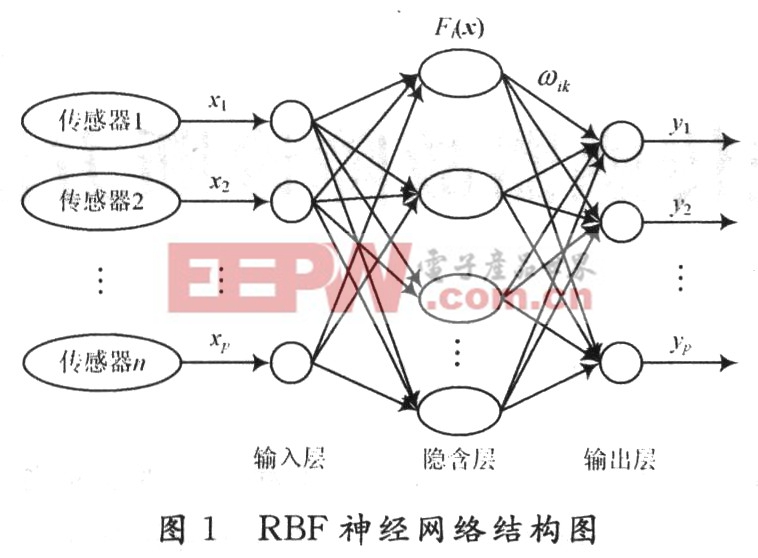
RBF神經網絡輸入層、隱含層、輸出層的節點數分別為n,m,p;設輸人層的輸入為x=(x1,x2,…,xj,…,xn),實際輸出為Y=(y1, y2,…,yk,…,yp)。輸入層節點不對輸入向量做任何操作,直接傳遞到隱含層,實現從X→Fi(x)的非線性映射。隱含層節點由非負非線性高斯徑向基函數構成,如式(1)所示。
![]()
式中:Fi(x)為第i個隱含層節點的輸出;x為n維輸入向量;ci為第i個基函數的中心,與x具有相同維數的向量;σi為第i個感知的變量,它決定了該基函數圍繞中心點的寬度;m為感知單元的個數(隱含層節點數)。|| x-ci||為向量x-ci的范數,通常表示x與ci之間的距離;Fi(x)在ci處有一個惟一的最大值,隨著|| x-ci||的增大,Fi(x)迅速衰減到零。對于給定的輸入,只有一小部分靠近x的中心被激活。隱含層到輸出層采用從Fi(x)→yk的線性映射,輸出層第k個神經元網絡輸出見式(2):

式中:yk為輸出層第k個神經元的輸出;m為隱層節點數;p為輸出層節點數;ωik為隱層第i個神經元與輸出層第k個神經元的連接權值。
RBF網絡的權值算法是單層進行的。它的工作原理采用聚類功能,由訓練得到輸入數據的聚類中心,通過δ值調節基函數的靈敏度,也就是RBF曲線的寬度。雖然網絡結構看上去是全連接的,實際工作時網絡是局部工作的,即對輸人的一組數據,網絡只有一個神經元被激活,其他神經元被激活的程度可忽略。所以RBF網絡是一個局部逼近網絡,這使得它的訓練速度要比BP網絡快2~3個數量級。當確定了RBF網絡的聚類中心ci、權值ωik以后,就可求出給定某一輸入時,網絡對應的輸出值。
2 算法學習
在此采用模糊K均值聚類算法來確定各基函數的中心及相應的方差,而網絡權值的確用局部梯度下降法來修正,算法如下:
2.1 利用模糊K均值聚類算法確定基函數中心ci
(1)隨即選擇h個樣本作為ci(i=1,2,…,h)的初值。其他樣本與中心ci歐氏距離遠近歸人沒一類,從而形成h個子類ai(i=1,2,…,h);
si
(2)重新計算各子類中心ci的值, 其中,xk∈ai;si為子集ai的樣本數,同時計算每個樣本屬于每個中心的隸屬度為:
其中,xk∈ai;si為子集ai的樣本數,同時計算每個樣本屬于每個中心的隸屬度為:
(3)確定ci是否在容許的誤差范圍內,若是則結束,不是則根據樣本的隸屬度調整子類個數,轉到(2)繼續。













評論