基于BP神經網絡的數字式渦流傳感器特性曲線擬合的實現

4 仿真研究
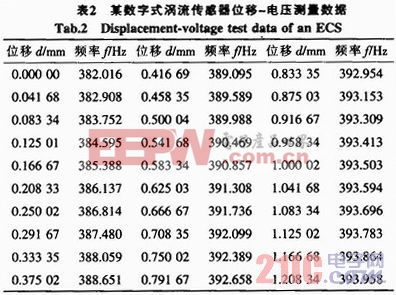
完成系統硬件連接,并對系統進行調試,通過實驗測得某數字式渦流傳感器系統輸出電壓和被測位移量之間對應關系的一組數據如表2所示。由實驗數據可知:d—f變化趨勢在被測試件位移量較小時基本上成線性關系;但是在被測試件位移量較大時,線性度較差,呈現非線性關系,這主要因為影響傳感器特性的因素有很多;被測試件表面平整度、表面磁效應、表面鍍層、表面尺寸以及傳感器的安裝和工作溫度等諸多因素都會對渦流傳感器的特性產生影響。為了驗證BP神經網絡對于位移一頻率關系擬合的正確性,本文采用最小二乘算法進行仿真對比研究。最小二乘算法擬合后殘差平方和的大小決定了多項式擬合的效果,為了盡可能降低各測量點的殘差平方和的數值,要合理選擇擬合的階次。擬合階次的選擇既要兼顧擬合曲線的光滑程度,又要注重考慮真實反映傳感器輸入、輸出之間的變化規律。利用MATIAB語言編寫最小二乘算法程序。誤差準則為:目標誤差rose(均方誤差)的計算公式如(8)式所示:
上述兩式中N為樣本長度。本文引用地址:http://www.j9360.com/article/159754.htm
取m=6階,最小二乘算法擬合結果如(10)式所示:![]()
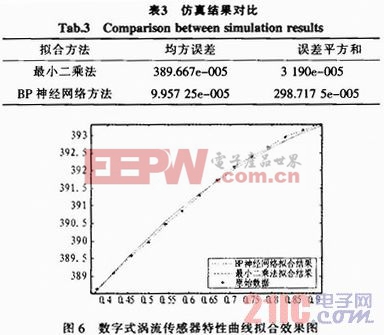
為了提高神經網絡的訓練速度,文中將實驗測得數據進行歸一化處理,將所收集的數據映射到指定的區間[0,1]之中,根據上述過程利用MATLAB語言編程建立BP神經網絡、并對網絡初始化、進行網絡訓練和仿真測試。基于BP神經網絡和最小二乘算法擬合曲線如圖6所示,仿真結果對比如表3所示。數字式渦流傳感器特性曲線擬合效果如圖6所示。
5 結論
仿真結果表明,只要實驗測得數據足夠多,就可利用所建BP神經網絡實現渦流傳感器輸入和輸出之間的非線性映射,從而得到渦流傳感器的特性曲線。基于MATLAB建立BP神經網絡擬合數字式渦流傳感器的特性曲線的程序設計簡單,且具有較強非線性處理能力和函數逼近能力,網絡運算速度快、性能穩定。

pid控制相關文章:pid控制原理
電流變送器相關文章:電流變送器原理


評論