基于BP神經網絡的數字式渦流傳感器特性曲線擬合的實現

1.2 測量原理
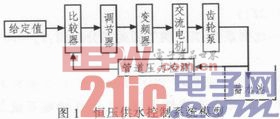
數字式渦流傳感器的測量原理方框圖如圖2所示。本文引用地址:http://www.j9360.com/article/159754.htm

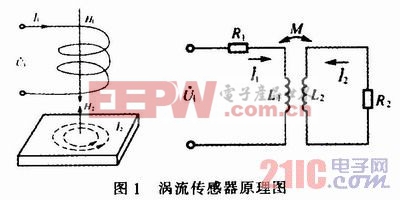
為了盡可能使數字式渦流傳感器輸出頻率達到穩定,實驗過程中選用性能穩定的集成LC振蕩器MC1648。在探頭接近破測試件時,因為探頭線圈L和諧振電容器C構成諧振回路,諧振頻率表達式如(5)式所示:
![]()
上式中L為探頭線圈自感值,C為諧振電容器電容值。因為電感L是位移d的單值函數,所以傳感器輸出信號的頻率f與被測試件的位移量d之間成正比。傳感器輸出信號經電壓比較器和整形電路輸出為符合TTL電平規范的脈沖數字信號,最后由計算機顯示輸出。
2 BP神經網絡原理
2.1 人工神經元結構
人工神經元是人工神經網絡中最基本組成單位。常用的人工神經元模型可用圖3模擬。
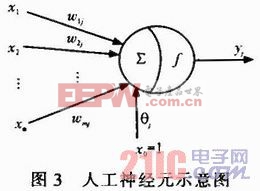
當神經元j有多個輸入xi(i=1,2,…,m)和單個輸出yj時,輸入和輸出的關系如(6)式所示:
![]()
式中θj為閾值,wij為從神經元i到神經元j的連接權重因子,f(·)為傳遞函數或稱為激勵函數。
2.2 BP網絡學習過程
BP算法是一種監督式的學習算法。BP神經網絡算法的主要思想是:假設輸入樣本為P1,P2,…,Pn,目標樣本為T1,T2,…,Tn,網絡的輸出為A1,A2,…,An。當輸出與目標樣本產生誤差之后,利用誤差反向傳播回去進行調整權值,盡可能使輸出A1,A2,…,An與目標樣本T1,T2,…,Tn相近,使誤差達到最小值,權值調整結束。BP算法是由兩部分組成:信息的正向傳遞與誤差的反向傳播。在正向傳播過程中,輸入信息從輸入經隱含層逐層計算傳向輸出層,每一層神經元的狀態只影響下一層神經元的狀態。如果在輸出層沒有得到期望輸出,則計算輸出層的誤差變化值,然后轉向反向傳播,通過網絡將誤差信號沿原來的連接通路反傳回來修改各神經元的權值直至達到期望目標。
3 BP神經網絡的MATLAB設計
設計一個BP網絡需要確定神經元的特性和網絡的輸入層、隱層、輸出層以及各層之間的傳輸函數。
3.1 網絡層數
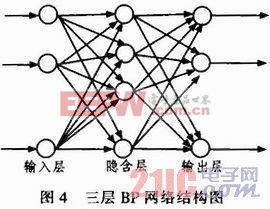
反向傳播網絡是基于BP誤差傳播算法的多層前饋網絡。多層BP網絡不僅有輸入節點、輸出節點,而且還有一層或多層隱含節點。一個三層的BP網絡理論上可逼近任意的非線性映射,為避免網絡規模過大,隱含層層數不宜多,因此文中在實現對于數字式渦流傳感器實驗數據曲線擬合時,采用三層的BP網絡就可以滿足需要。三層BP網絡的拓撲結構如圖4所示,包括輸入層、隱含層和輸出層,層與層之問采用全連接方式。各神經元與下一層所有的神經元聯結,同一層單元之間不存在相互連接,用箭頭表示信息的流動。
3.2 輸入層、輸出層的節點數
BP網絡的輸入層的神經元數由輸入數據變量個數確定。
本文以數字式渦流傳感器的輸入(被測位移量)作為輸入節點,輸入層的節點數為1;以數字式渦流傳感器的輸出(輸出頻率f)作為輸出節點,輸出層的節點數為1。

pid控制相關文章:pid控制原理
電流變送器相關文章:電流變送器原理



評論