基于CAN通信的卡車語音報警器的設計

汽車診斷技術是汽車安全技術中不可缺少的一部分,它能在汽車發生故障時及時地進行語音報警,避免事故的發生。CAN即控制器局域網,是國際上應用最廣泛的現場總線之一。由于CAN總線技術的優良特性,在汽車電氣系統以及其他一些實時控制單元中得到廣泛應用。一種基于CAN總線的通信網絡具有速度高、抗噪性強及通用性好等優點。
本文引用地址:http://www.j9360.com/article/157686.htm我們設計的基于CAN總線技術的卡車語音報警系統能給汽車乘員提供一個安全的駕乘環境。該語音報警系統采用了摩托羅拉公司的M68HC908GZ16微控制器,該微控制器尺寸小,資源齊全,具有很高的性價比。
CAN總線位定時
CAN總線采用同步串行通信方式,數據流中的字符與字符之間、字符內部的位與位之間都同步,這就要求收/發雙方必須以同步時鐘來控制數據的發送和接收。要在相當長的數據流中保持位同步,接收端必須能識別每個二進制位是從什么時刻開始的,這就是位定時。通常為保證接收器時鐘和發送器時鐘嚴格一致,采用接收器通過解調器從數據流中提取同步信號,或者接收器和發送器使用統一的時鐘的方法。但是即便這樣,仍然很難解決總線傳輸延時問題。針對以上問題, CAN總線的位定時改進了位編碼/解碼。
CAN總線位定時由4部分組成:同步段(SYNC_SEG)、傳播段(PROP_SEG)、相位段1(PHASE_SEG1)和相位段2 (PHASE_SEG2)。同步段用于同步總線上的各節點,在此段等待一個跳邊沿;傳播段用于補償網絡內的物理延遲時間;相位段1及相位段2用做補償相位誤差。在采樣點讀總線電平。
M68HC908GZ16微控制器(見圖1)中內置CAN控制器,提供了波特率控制寄存器;SJW(重同步跳轉寬度)決定了一次重同步期間一個位時間被延長或縮短的時間量子;BRP為波特率預分頻系數;Spl(采樣模式位)決定對有效位采樣的次數。
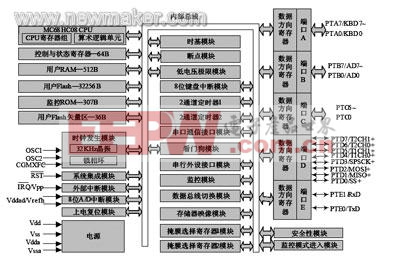
圖1 MC68HC908GZ16的內部結構







評論