基于WiFi的遠程視頻傳輸智能機器人設計

摘要 WiFi以其強大的覆蓋范圍和更高的傳輸速率得到廣泛應用。文中研究了無線視頻傳輸技術在機器人中的應用。文中設計的WiFi機器人是以WiFi無線網絡為數據傳輸載體,實現實時控制、音視頻傳輸和圖像采集等功能的智能系統。經測試,該機器人可用于在反恐偵查、戰場C4ISR系統、消防救災、生命探測等民用及軍事領域。
關鍵詞 WiFi;機器人;遠程視頻傳輸;數據采集
WiFi是一種無線局域網運用技術,其出現以來,憑借組網方便、易于擴展等特點,有著廣泛的應用前景。而無線接入和高速傳輸是WiFi的主要技術優點,WiFi技術與機器人技術的結合便產生了WiFiRobot。WiFi Robot是集遠程無線通訊、音視頻傳輸、數據采集、多向機械云臺、燈光控制、環境檢測、超聲波測距、紅外壁障、超聲波領航、動力四驅、攝像頭云臺等功能為一體的多功能智能遙感機器人,以WiFi網絡作為數據傳輸平臺,以高速MCU為數據處理中心,可通過電腦、智能手機、平板電腦等設備進行遠程控制,并可拓展更多功能。
1 基本原理
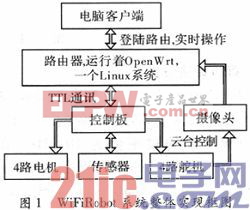
設計的機器人所要實現的功能為:操作員在操作終端通過WiFi無線網絡連接到小車內置的WiFi模塊上,并向其發出相關操作指令,WiFi模塊接收指令并傳遞給內置的單片機,單片機通過控制電路讓機器人執行相應的指令;同時,安裝在機器人上的各種傳感器和攝像頭可以通過WiFi網絡將數據反向傳遞給操作終端,從而實現上下行控制及雙向通信,以便操作員實時了解機器人周圍的環境,并根據環境情況發出指令控制機器人執行特定的任務,實現交互式操作,圖1為系統整體實現框圖。
2 硬件設計
硬件系統由車體部分、路由器、攝像頭及云臺、驅動板、紅外壁障、車燈部分等構成。
(1)車體部分。車體部分主要由4個12 V/120轉直流電機和電池組構成,電機兩兩并聯,相當于驅動兩個電機。為方便電池充放電,設計了充放電電路,只需撥動開關即可實現充放電操作。電池組電源12 V,可多個并聯使用,為機器人提高持久動力。
(2)攝像頭及云臺。攝像頭選擇高質量高清攝像頭進行監控,攝像頭滿足0°~180°水平,0°~180°上下旋轉,可以遠程打開或關閉。攝像頭型號為索尼PS2,通訊接口為USB協議。云臺由2個MG995數字舵機及其他輔助材料構成。
(3)路由器(WiFi模塊)。WiFi模塊采用TP—LINK全新推出的150 Mbit·s-1迷你型3G無線路由器。該路由器具有尺寸小,供電電壓低的特點。其供電電壓只有5 V,且支持OpenWrt。OpenWrt是一個基于Linux的開源路由固件,提供了一個完全可寫的文件系統及軟件包管理,對支持OpenWrt的路由器刷機后,其相當于一個Linux小系統。路由器選擇OpenWrt作為操作系統,將USB攝像頭采集的現場圖片發給遠端的PC控制終端,并將上位機發出的命令通過串口轉發給單片機控制系統。
(4)驅動模塊。控制板主要包括電源模塊、電機驅動、舵機驅動、下載串口、單片機電路、紅外壁障、車燈控制以及數據通信接口等。在此主要介紹電機驅動和舵機驅動兩個驅動模塊。電機驅動采用英飛凌公司的BTS7960直流電刷電機驅動芯片,其具有大電流MOSFET半橋結構。芯片具有較高的集成度和足夠的輸出能力,并在能耗方面具有優勢。在集成化和小型化的電機控制系統中,適合作為理想的電機驅動芯片。
圖2為BTS7960與單片機組成的H電機驅動單元。由于所采用驅動芯片是半橋,因此需要采用兩片以構成全橋實現電機的正反轉。
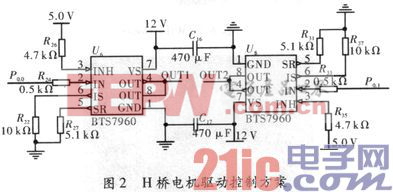
單片機產生2路PWM輸出作為兩片BTS7960的控制信號,同時要求PWM0、PWM1不能同時為高電平。采用定時器輸出硬件PWM脈沖,使得單片機CPU只在改變PWM占空比時參與運算,這樣可大幅減輕系統運算負擔和PWM軟件編程成本。

路由器相關文章:路由器工作原理
路由器相關文章:路由器工作原理








評論