基于WiFi的遠程視頻傳輸智能機器人設計

3.2 上位機軟件
對于控制平臺,文獻給出了一種基于Windows CE.net技術的方法,文中使用Visual Studio2010編寫C#上位機客戶端。采用TCP/IP協議,利用Socket發送數據包到路由器。客戶端包括兩個窗口:主窗口和配置窗口。主窗口包括視頻顯示區及控制按鈕區,主要用于顯示回傳視頻和實現機器人運動控制。配置窗口主要完成WiFi無線網絡及機器人控制指令自定義鍵值的配置。配置窗口和主窗口分別如圖5和圖6所示。本文引用地址:http://www.j9360.com/article/153531.htm
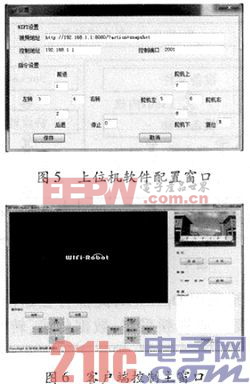
根據表1的通信協議,上位機通過Socket以Byte打包的方式向機器人發送控制命令,同時接收攝像頭回傳視頻流并在視頻顯示區實時顯示。視頻部分也可將攝像頭拍攝的視頻分解成一張張獨立的jpg圖片發送到客戶端,客戶端再將圖片組合成視頻。對于Socket數據發送,首先創建Socket對象的實例,創建Socket實例后上位機即可通過Connect方法連接到路由器,并通過Send方法路由器發送數據。數據發送完成后用Close方法關閉Socket以釋放資源。
除此之外,采用配置文件的方式來存取上一次配置的數據,以免重復配置,并通過定義8個鍵盤值,便于觀察事件的執行,以此可方便地通過鍵盤的觸發事件實現電機和舵機的全方位移動,且增加了拍照和車燈控制命令,經測試上位機軟件運行良好。
3.3 下位機軟件
驅動板微處理器采用STC公司的STC89C516芯片。STC89C516單片機是宏晶科技推出的新一代超強抗干擾、高速、低功耗的單片機,指令代碼完全兼容傳統的8051系列單片機,這為很多嵌入式控制系統提供了一種靈活性高且成本低的方案。下位機程序主要包括:外部中斷、舵機PWM中斷、定時器、串口中斷、初始化等。下位機程序接收來自路由器轉發的上位機命令,實現數據接收、攝像頭云臺全方位控制、電機轉向、車燈控制、電池電量指示、紅外壁障等功能。
4 結束語
經過實際調試運行,WiFi Robot的實際控制距離可以達到100 m。WiFi Robot具有實時視頻傳輸、人工自主控制、紅外壁障等功能。實物如圖7和圖8所示。
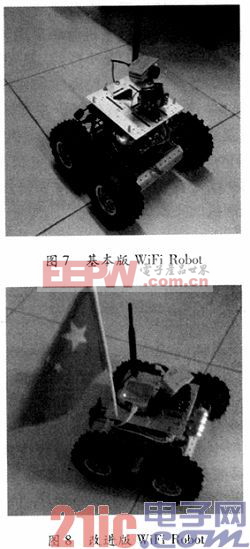
在目前所設計機器人的基礎上,也可以對系統的功能進行拓展,如加載多自由度機械臂、GPS定位、超聲波測距、外網控制等,則可實現全方位、超遠距離控制,并廣泛應用于險情探測、圖像采集、目標定位、無線通信等領域。

路由器相關文章:路由器工作原理
路由器相關文章:路由器工作原理








評論