基于WinCE環境的CAN適配卡驅動程序的設計與實現

1.引言
本文引用地址:http://www.j9360.com/article/152313.htmWinCE是一種為多種嵌入式系統和產品設計的緊湊、高效、可升級的操作系統,WinCE 采用標準模式,其最主要的特征:為有限的硬件資源提供了多線程、多任務和完全優先級的計算環境。
WinCE操作系統支持兩種類型的驅動程序:[1]本地驅動程序(Build-In),是把設備驅動程序作為獨立任務實現,直接在頂層任務中實現硬件操作,完成特有專用的驅動程序;流接口驅動程序,WinCE的I/O系統將設備程序作為內核過程實現,這種方式便于實現I/O子系統的層次模型,便于文件系統一起把設備作為特殊文件處理,提供統一的管理、統一的界面和統一的使用方法,并把設備、文件及網絡通信組織成為一致的更高層次的抽象,為用戶提供統一的系統服務和用戶接口。驅動程序封裝了將這些命令轉換為它所控制的設備上的適當操作所需的全部信息。流接口驅動程序有在啟動時加載和動態加載兩種方式。本文實現的在WinCE環境下流結構的PC/104-CAN驅動程序是在系統啟動時加載的。
CAN總線是德國Bosch公司開發的一種串行數據通信協議,CAN總線屬于總線式串行通訊網絡,具有總線為多主方式工作且無需站地址節點信息、CAN網絡上的節點信息分成不同的優先級、總線沖突仲裁時間低和總線的通信介質選擇靈活等優點[2]。
CAN適配卡的核心工作單元是它的控制器,控制器SJA1000的組織結構如圖1所示。
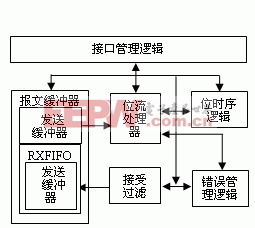
圖1 SJA1000的內部結構方框圖
其中,接口管理邏輯(IML):[3]它接收來自微控制器的命令,控制CAN寄存器的尋址,并向微控制器提供中斷和狀態信息;發送緩存器:存貯發送到CAN網絡上的完整信息;位流處理器(BSP):是一個控制發送緩存器和接收緩存器與CAN總線之間控制數據流的程序裝置,同時具有執行錯誤檢測、仲裁、總線填充和錯誤處理的能力;位定時邏輯(BTL)單元:主要監視串口的CAN總線,并處理與總線有關的位時序,使SJA1000同步于CAN總線上的位流;錯誤管理邏輯(EML):主要完成接收BSP的出錯報告,并按照CAN協議完成錯誤界定, 從而使BSP和IML進行錯誤統計。
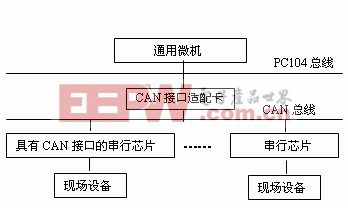
圖2 CAN適配卡應用系統的總體結構圖
圖2 中,通用微機的操作系統是WinCE,上位通用微機通過PC/104總線與CAN接口適配卡相連,CAN接口適配卡與具有CAN接口的串行芯片通過CAN總線進行數據交換,所采用的協議是CAN協議。在CAN協議中,報文的表示、傳送和控制主要由4種類型的幀來完成[4]:數據幀,攜帶數據信息,由發送器發送到接收器;遠程幀,主要用于請求發送具有相同標識符的數據幀,是通過總線發送的;出錯幀標識總線錯誤,由檢測出總線錯誤的任何總線單元產生;超載幀主要為當前的和后續的數據幀提供附加延遲。














評論