基于WinCE環境的CAN適配卡驅動程序的設計與實現

如果CAN接收到一個報文,該報文通過驗收濾波器驗收并放入接收FIFO,則產生一個接收中斷。中斷服務程序接收到這個中斷后,將這個接收到的報文傳送到由驅動程序維護的報文存儲區中,并置位命令寄存器的釋放緩存區標志RRB。CAN_Read函數并不等待來自CAN控制器的接收報文成功中斷,而是讀取保存在由驅動程序維護的報文存儲區中的報文。CAN_Read函數的流程圖如圖4所示。
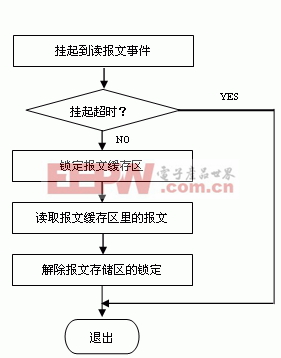
圖4 CAN_Read函數的流程圖
3.3中斷服務線程模塊的實現
在CAN適配卡的SJA1000控制器中,報文的發送與接受是采用中斷方式來完成的。以報文的中斷發送為例,在向CAN數據寄存器中寫入報文并且向命令寄存器寫入發送命令后,系統通過調用WaitForSingleObject函數將當前的發送線程掛起在某個事件的任務隊列中,觸發該事件將會使系統調度掛起在該事件的任務隊列中的任務繼續執行,而該事件只有在CAN控制器產生發送成功中斷后在中斷服務線程中觸發。中斷服務線程程序流程圖如圖5所示。
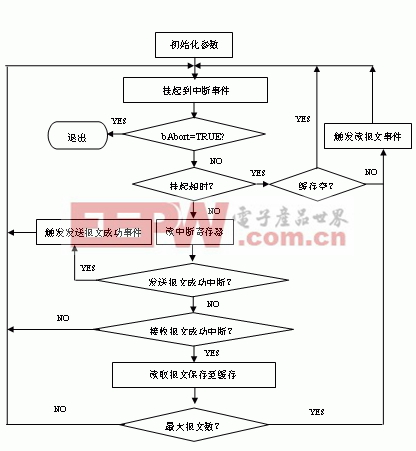
圖5 中斷服務線程程序流程圖
驅動程序中的另外兩個模塊主要由CAN_Close 、CAN_IoControl函數來完成,前者主要負責在關閉CAN句柄時資源的回收任務,后者主要用于設置CAN的工作參數,如波特率,報文格式等,在此不作過多介紹。
4 結束語
本文的CAN適配卡驅動程序的開發環境:上位機是普通的PC機,下位機的操作系統是WinCE,硬件是深圳藍天工控有限公司的嵌入式PC/104總線主板PCM3568。驅動程序已經過測試、驗收。CAN適配卡驅動程序運行可靠、通信穩定。產品已經被多個產家應用于實際的工業控制領域。
參考文獻
[1] 李蒙 Windows CE驅動程序開發[J] 計算機工程與設計,2004
[2] 徐平 WindowsCE.Net下CAN卡的驅動程序設計[J] 單片機及嵌入式系統應用 2004-12
[3] 鄔寬明.CAN總線原理和應用系統設計[M]. 北京航空航天大學出版社,1996
[4] 繞運濤 現場總線CAN原理與應用技術[M] 北京航空航天大學出版社,2002
[5] 孫光武 現場總線適配器的軟硬件設計[J] 電子技術應用 1999.8














評論