基于TI Z-STACK的智能小車調度系統設計

摘要:針對高職院校物聯網應用技術專業實訓問題,基于MCS-51及CC2430單片機、紅外及超聲波傳感器,設計了一套基于TI Z-STACK協議棧的智能小車調度系統。分析了無線網的組建流程及軟件實現方法。
關鍵詞:Z-STACK協議棧;智能小車;物聯網實訓;CC2430
無線傳感器網絡是高職高專物聯網應用技術專業課程體系中的核心課程之一。目前,各院校的無線傳感器網絡課程實驗實訓平臺多以51內核的CC2430為主,如何快速從51單片機轉型到掌握CC2430是專業實訓平臺需解決的核心問題。為此,設計了本套基于單片機及TI Z-STACK協議棧的智能小車調度系統。
1 系統組成及功能
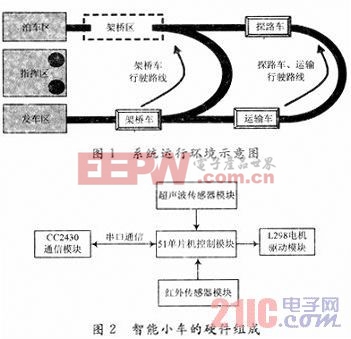
本系統由模擬通信指揮車(Coordinator)、探路車(Sensor Endpoint)、架橋車和運輸車(Endpoint)及沙盤等構成,在圖1所示的模擬調度環境運行。由探路車先行獲取路面信息,發送給通信指揮車,由通信指揮車調度其他車輛行駛。探路車若進入架橋區,則向通信指揮車報告路面遇阻信息,然后由通信指揮車下發指令,讓運輸車停車,讓架橋車趕赴架橋區架橋。待橋面架好后,探路車再次向通信指揮車報告路面恢復信息,由后者下發指令,調度探路車、運輸車繼續行駛,最終到達指定泊車區。
2 硬件電路設計
通信指揮車、架橋車、運輸車的硬件電路包括51單片機控制模塊、紅外傳感器模塊、L298N電機驅動模塊及CC2430通信模塊,探路車還包括超聲波傳感器模塊,如圖2所示。其中,紅外傳感器模塊主要用于巡線;超聲波傳感器用于探測架橋區的斷裂路面;L298N電機驅動模塊用于驅動小車電機;51單片機控制模塊用于小車巡線控制,并與CC2430通信模塊通過串口方式進行通信。CC2430通信模塊是調度系統的核心,用于完成無線通信網絡組建和數據傳輸功能。由于CC2430和51單片機控制模塊分別工作于3.3 V和5 V邏輯電平,故在進行串口通信時需進行電平轉換。本系統采用在51單片機的TX和CC2430的RX引腳間接100 Ω電阻的方案保證了二者通信正常運行。










評論