基于78F0712的E-BIKE用無刷直流電機控制器的設計

摘要:本文介紹了以電機控制專用芯片μPD78F0712為核心的E-BIKE用無刷直流電機控制器的設計,主要闡述了PWM控制電路結構及功率開關器件的選擇,驅動電路,保護電路以及軟件設計。
本文引用地址:http://www.j9360.com/article/86947.htm關鍵詞:μPD78F0712;無刷直流電機;控制器;電動自行車
張廣棟:工程師。
引言
電動自行車是一種安全、經濟、清潔的綠色交通工具,不僅在能源、環境方面有其獨特的優越性和競爭力,而且能夠更方便地采用現代控制技術實現其機電一體化的目標,因而具有廣闊的發展前景。
在許多對調速精度要求不高的應用場合,無刷直流電機(BLDC )的調速方式主要通過開環PWM 調制來實現。導通邏輯信號上疊加PWM 信號,通過外部給定PWM 的占空比來實現轉速變化,硬件實現容易,成本較低。目前市場上電動自行車的調速大多采用這種方式。
為提高E-BIKE(電動自行車)用無刷直流電機的控制性能,本文提出了一種采用NEC公司的電機專用控制芯片μPD78F0712為核心的控制方案,并對電機的速度和電流進行了閉環控制,目的在于提高其動態和靜態特性,優化其控制性能。
μPD78F0712
μPD78F0712為NEC公司的8位電機控制專用驅動芯片,其特點如下:最小指令執行時間可達0.1ms;外部時鐘頻率20MHz;片上高速晶振(8MHz);32個8位通用寄存器;片上乘法/除法器;16K ROM,768 Bytes RAM;自編程功能;片上看門狗定時器;10位逆變器控制電路;4通道10位A/D轉換;15路IO端口;實時輸出端口。
無刷直流電機控制系統
基于μPD78F0712的無刷直流電機的控制系統結構框圖如圖1所示。
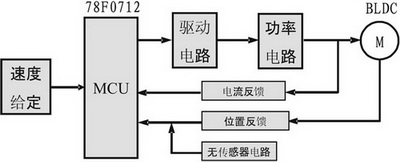
圖1 控制系統結構框圖
框圖中各個功能塊的作用如下:速度給定電路得到自行車手柄的模擬給定速度;驅動電路把MCU的驅動信號轉換為功率MOSFET的驅動信號,控制功率管的導通狀態;功率電路實現直流到交流的變換,控制電機的電流;電流反饋用于檢測電機電流;位置反饋用于檢測電機轉子的位置;無傳感器電路根據電機的反電動勢確定轉子的位置。下面將具體介紹各個部分的電路和功能。
位置檢測電路
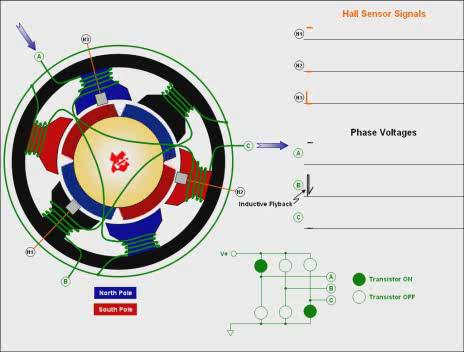
無刷直流電機采用三個空間相差120o的霍爾器件進行位置檢測。其輸出波形如圖2所示。
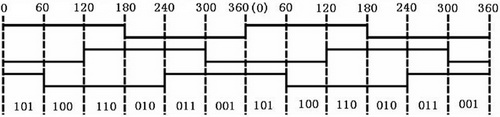
圖2 霍爾器件的輸出信號
這三個信號經過濾波處理后由單片機的三個外部中斷輸入引腳進行處理,得到正確的轉子位置信息。由MCU根據確定的換相控制邏輯對電機進行換相,得到連續的輸出轉矩,從而使得電機可以正確的連續運行。同時根據這三路信號的位置信息經過微分計算可以得到電機的實際轉速,為保證系統的穩定性,應對速度進行濾波處理。位置采樣電路如圖3所示。
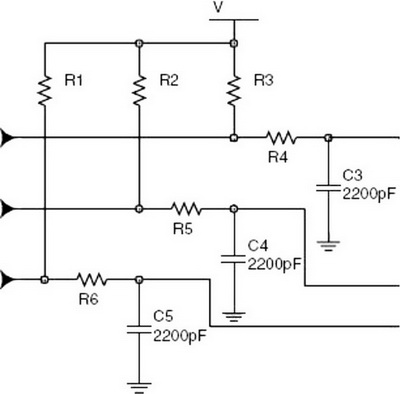
圖3 位置采樣電路
電壓檢測電路
電壓檢測電路的作用在于實時檢測蓄電池的輸出電壓,以防止在運行過程中蓄電池因為過放電而受到損壞。通過對輸出電壓進行電阻分壓并通過控制芯片的A/D轉換電路進行轉換,在控制程序中實現欠壓保護功能。
電流檢測電路
電流檢測電路用于檢測在運行過程中的流過電機繞組和功率電路的電流的瞬時值,并進行電流采樣用于系統的電流閉環控制和過流保護。為降低系統的成本,根據無刷直流電機的兩兩通電的控制方式的工作原理,在三相功率驅動電路的下橋臂與系統的地之間串入一個5毫歐的功率電阻,其兩端的電壓經過放大后進行電流采樣。
功率電路
功率電路如圖4所示,供電電壓為直流48V,采用三相橋式逆變電路,工作方式為兩兩通電,即在每個工作周期內每隔60度換相一個功率管,每個功率管導通120度,同一橋臂的兩個MOSFET不需要添加死區時間。
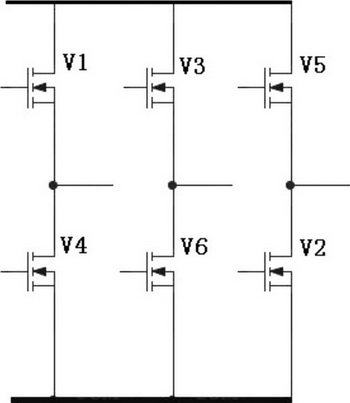
圖4 功率電路
驅動電路
驅動電路一般包括兩種形式:采用專用驅動芯片或用分立器件構成驅動電路。本系統中采用后一種方案,可以在保證可靠性的前提下降低系統的成本。由分立器件組成的一相橋臂的驅動電路如圖5所示。
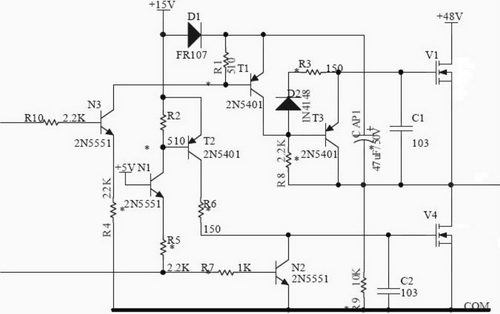
圖5 驅動電路

pwm相關文章:pwm是什么
晶振相關文章:晶振原理





評論