利用雙電機控制技術簡化高能效電器設計

轉子角度估算器和電流控制環路大約要消耗1,400個系統時鐘周期,相當于128MHz最大系統時鐘頻率下的11μs時間。這樣,在相當于20kHz開關頻率的50μs PWM周期下,可以同時實現對兩個電機的控制。當然,為控制兩個電機,芯片需要兩套空間矢量PWM調制器和用于電流采樣的額外模擬輸入端。圖2是一個雙電機控制IC的結構圖,它包含嵌入式運動控制引擎和用于執行應用層代碼的8位微控制器內核。這種方法的優勢是它能將在微控制器上執行的慢速系統級功能與MCE執行的高速電機控制算法分隔開來。
本文引用地址:http://www.j9360.com/article/84169.htm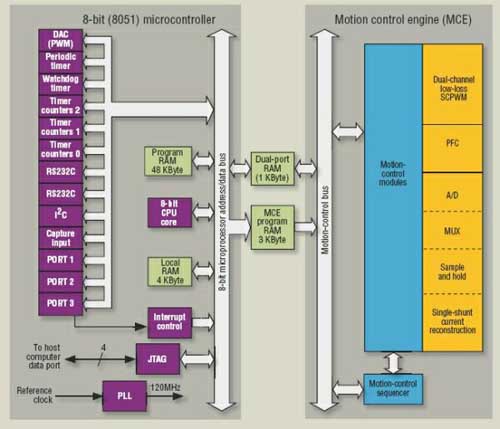
圖2:包含用來執行應用層任務的8位微控制器的雙電機控制芯片。
MCE庫函數
高速執行控制算法的關鍵是MCE庫函數在ASIC中的實現效率。兩個重要的反饋控制單元(PI控制補償器和矢量旋轉塊)可以作為庫函數的典型例子。ASIC實現需要優化硅片和時鐘周期的使用,并同時不犧牲魯棒性和可靠性。
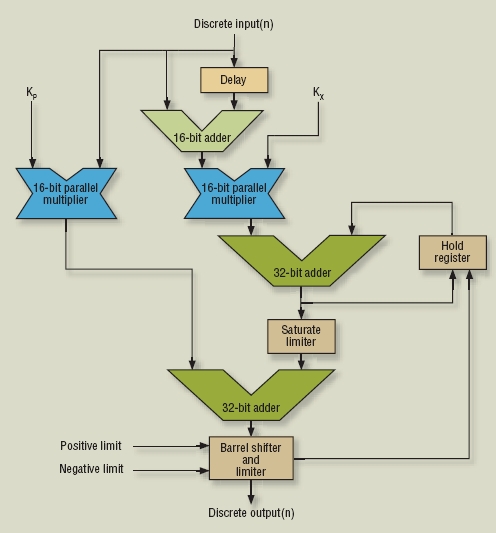
圖3:比例積分(PI)控制補償器可高效地使用MCE硬件資源和時鐘周期。
眾所周知的PI控制補償器的ASIC實現(圖3)基于連續時域轉移函數:
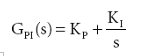
將這個表達式轉換到離散時間域就可以產生一組定義ASIC實現的微分方程:
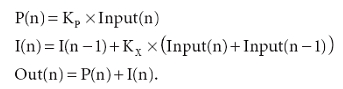
為保持低輸入電平時的精度,并將輸出重新調節到16位變量,積分項的總和具有32位分辨率。抗飽和模塊可以在輸出達到系統的物理極限時,防止積分項飽和。
矢量旋轉模塊是一個二維矩陣函數,用來實現旋轉和固定參考系之間的電壓轉換。前向旋轉具有正弦和余弦項:
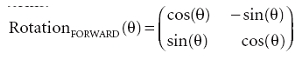
有多種三角恒等式可以將正弦和余弦項的運算簡化為0到90?范圍的正弦函數運算,但根據可用硬件的不同,該項的運算會有所變化。在一些微控制器實現中,快速乘法函數的缺乏將迫使軟件開發人員依賴簡單的查找表。在具有單周期乘法指令的DSP或RISC處理器中,可用泰勒展開式計算正弦函數。
針對基于一系列加法、減法和移位函數,僅在13個周期內就可實現12位精度的ASIC實現,開發被稱為CORDIC算法的矢量旋轉函數(圖4)。這種運算要比在32位RISC處理器上使用泰勒展開式進行運算快10倍。
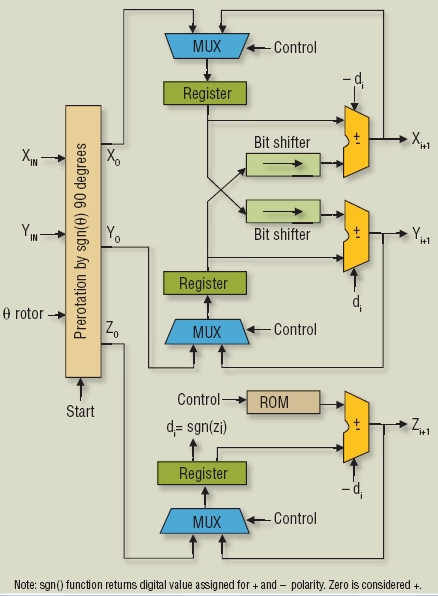
圖4:CORDIC算法計算矢量旋轉的速度比使用泰勒展開式的方法快一個數量級。
簡化電機控制
盡管可能存在許多種配置,但圖5所示的采用單個控制IC操作雙電機平臺的配置是最高效的。這種配置不僅能消除用來控制第二個電機的第二個IC(該IC導致了不必要的冗余設計),還使得兩個電機的復雜接口設計成為可能。例如,當一個電機發生故障(比如短路或閉鎖),第二個電機可以立即像反射動作一樣被去激勵,從而減少與主控制系統通訊相關的延遲。以空調應用為例,壓縮機電機的速度和蒸發器風扇要求相互跟蹤以優化工作效率,控制系統通過直接寫入MCE寄存器設置電機速度,并避免多個IC之間的復雜通訊。
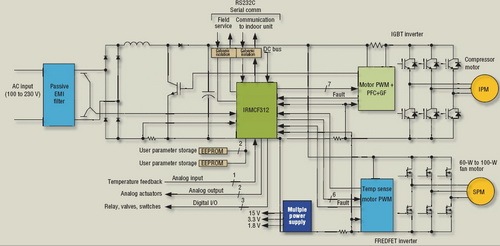
圖5:通過單個平臺提供的雙電機控制可以消除冗余硬件和對兩個分離控制器之間的復雜通訊鏈路的需求,并能實現兩個電機之間的復雜接口。




評論