微型電網功率調節系統的四象限運行動態特性研究

摘要:本文主要研究一個與城市供電并聯的微型電網在功率調節系統四象限運行條件下的動態特性,以城市供電系統、微電源、功率調節系統、靜態負載、以及其他系統組件組成的系統為研究對象。首先建立系統組件的數學模型,利用Matlab/Simulink的SimPowerSystems模塊進行模擬分析。結果表明:此功率調節系統能在不影響其他組件的情況下進行四象限輸出控制,且該微型電網系統運行穩定,各電源運行也符合預期,為功率調節系統的設計提供重要參考。
本文引用地址:http://www.j9360.com/article/284995.htm微型電網是將一定區域內的負載與微型電源整合成可控制的系統以提供電力給用戶。微型電網技術主要包括微汽輪機、燃料電池、風力機、太陽能光電、儲能技術等,其特點包括即插即用、規模可變、余熱發電、可在孤立和并聯運行間平穩轉換。此外,微型電網應能提供設備即插即用的功能,即系統內模塊可任意變動位置而不需調整任何監測參數與保護設定閾值。微型電網孤立運行時,因可再生能源機組系統內大都含有變頻器,除傳統的過電流保護方式和保護協調觀念需要調整外,分散式電源控制、電力潮流控制以及系統擾動下的卸載控制等,均需作相應的調整[1-2]。
本文主要研究一個與城市供電并聯的微型電網在功率調節系統四象限運行條件下的動態特性,通過數學模型構建微型電網系統的系統結構模型、系統組件模型,然后利用MATLAB的SimPowerSystems模塊對各模型進行動態特性模擬,所得結果可作為功率調節系統設計與應用的重要參考[3]。

1 微型電網系統的數學模型
1.1 狀態空間表示法
狀態空間法是利用一組首階微分方程構建系統組件及整個系統的動態模型,此法可將組件模塊化后進一步加以連接,如此可使研究的系統結構具有彈性且多元化。利用狀態空間法,系統組件可表示為[4-5]:
![]() (1)
(1)
式中,[x]是n維狀態參數矩陣, [u]是m維輸入矩陣,[A]、[B]分別為nxn維系數矩陣和nxm維控制矩陣,p 是微分算子。

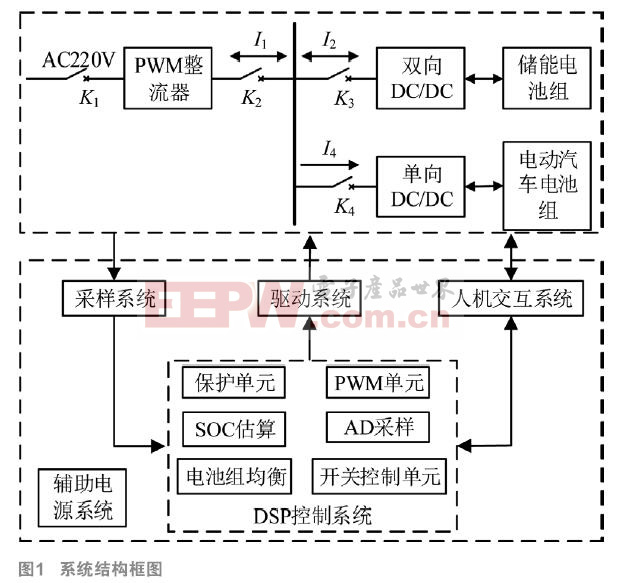
假設與城市供電系統并聯的微型電網由一套容量為68kW的微型汽輪機系統,一套容量為32kW的太陽能發電系統,一套容量為98kW的功率調節系統,靜態負載以及其他組件構成。其中微型汽輪機系統由微型汽輪機、永磁式發電機、轉換器和控制機構組成;太陽能系統由太陽能光板、轉換器和控制機構組成;功率調節系統由蓄電池、轉換器和控制機構組成。在一定程度上,各系統中的轉換器和控制機構都是相似的。兩組靜態負載功率均為27.5kW,外加一組選擇性負載,功率為19kW。圖1為系統組件功率潮流,圖中各組件的實功與虛功關系可表示為:
 (2)
(2)
功率調節系統的四象限運行動態特性為:
 (3)
(3)
式中,PMG,QMG為微型電網的實功率與虛功率,PMGT1,QMGT1為MPS的實功率與虛功率,PPV1,QPV1為PVPS的實功率與虛功率,PPCS,QPCS為PCS的實功率與虛功率,PL1,PL2,PL3,QL1,QL2,QL3為SL的實功率 與虛功率。
2 系統組件的數學模型
2.1 太陽光電系統模型

太陽能光電系統由許多太陽能電池經過串聯或并聯組成,太陽能電池由多個P-N結半導體組成,將光能轉化成電能。如圖2所示 ,用一個電流源表示太陽能模塊的等效電路,其中電流源Iph為太陽能板經光照后產生的電流,Rs和RSH為材料內部的等效串聯和并聯電阻,Ipv,Vpv表示光電板輸出的電流和電壓,RL為外加負載。一般情況下,為簡化分析將 Rs和RSH忽略不計,太陽能電池輸出電流、電壓的關系為[6-7]:
 (4)
(4)
 (5)
(5)
 (6)
(6)
式中,Ipv,Isc分別為太陽能電池輸出電流和短路電流,Voc,Vmp,Imp分別為太陽能電池開路電壓,最大功率處的電壓及電流,Ett,Est為太陽能日照強度和參考強度,α,β為太陽能電池溫度系數和電壓溫度系數, Ta為環境溫度[8]。
對于大部分微電網系統,風力發電與太陽能發電系統均具適和最大功率點追蹤的控制策略。根據典型太陽能電池P-V曲線,最大功率追蹤根據功率與電壓的變化斜率來調整電壓以追蹤最大功率點。當dP/dVp>0時,電壓Vp增加,當dP/dVp<0時,電壓vp減少。圖3為據此準則設計最大功率追蹤控制器結構。<>

2.2 功率調節系統模型
本文使用的功率調節系統搭建在一個低壓轉換平臺上,通過彈性與高模組化的電力電子結構提供較寬的頻帶特性。通過功率調節系統的寬頻特性強化和提高智能電網的性能、品質及可靠度。本功率調節系統根據系統需求調節控制實功率和虛功率。在市網停電條件下,設定系統孤島運行模式或關閉系統,繼續為負載供電。當市電恢復供電后,功率調節系統重新并聯,允許無縫連接到市電。而圖4為一個功率調節系統實功率與虛功率控制策略示意圖,包括轉換器、直流連接界面、市電與耦合單元以及需量控制器。在此控制模式下,為設定值,通過這兩個設定值,可使功率調節系統達到四象運行。微型電網在 固定功率模式下, 可由式(2),(3)求得。

2.3 微汽輪機模型
微型汽輪機模型與汽輪機模型相似,模塊結構包括汽輪機和控制系統。控制系統包括速度控制、溫度控制、加速度控制和燃料控制系統。通過改變汽輪機速度控制參數,并控制原動機穩定運轉,使汽輪機在設定參數下運行。溫度控制可預防原動機超溫,當溫度過高時溫度控制傳輸信號至燃料系統降低燃料輸入。加速度控制是當原動機啟動或加速到額定轉速時,傳送控制信號至燃料系統使轉速不會持續上升,燃料控制系統主要控制輸送至汽輪機燃料的多少。
本文來源于中國科技期刊《電子產品世界》2016年第1期第60頁,歡迎您寫論文時引用,并注明出處。





評論