基于 DSP 的電子負載:模糊自適應整定 PID 控制策略

4.3模糊自適應整定PID控制策略
本文引用地址:http://www.j9360.com/article/270110.htm在實際調試過程中,現場被控測試對象參數未知,電子負載電源板和信號板上打規模的模擬器件的引進,存在控制信號慣性滯后性,使得常規PID控制器往往不能達到理想的控制效果,為了進一步提高PID控制的性能,以適應復雜的工況和高性能指標的控制要求,模糊PID控制就是針對控制信號時延而提出的,將傳統的PID調節技術和模糊控制技術相結合,利用模糊邏輯對PID調節器的參數進行調節以補償模擬器件延時對系統的影響。因此,本系統引入模糊控制理論設計一個模糊PID控制器,根據實時監測的電壓或電流值的變化,利用模糊控制規則自動調整PID控制器的參數。電子負載系統信號板控制的核心部件是MOSFET,在恒定的漏源電壓下,它的漏極電流和柵源電壓成非線性變化,而且隨著漏源電流的變化導致MOSFET的溫升,其轉移特性曲線處于變化的過程中。在PID控制器中引入智能控制算法,使電子負載控制精度進一步提高,將對電子負載調試的經驗作為知識DSP中,使DSP根據現場實際的情況,自動調整PID參數,成為具有PID參數自整定功能的智能調節器。
由于經驗不易精確的描述,控制過程中各種信號及評價指標不易定量的表示,模糊理論是解決這一難題的最好方法,運用模糊控制規則,DSP根據電子負載系統的實際響應情況,運用模糊推理,實現對PID參數的自動調整,這就模糊自適應PID控制。以誤差e和ec作為輸入,根據偏差e和偏差變化率ec的變化,利用模糊控制規則在線對PID參數進行在線的修改,通過公式

不斷地調整PID控制器中三個參數,以滿足不同時刻PID參數自整定的要求,其機構如圖4.7所示。
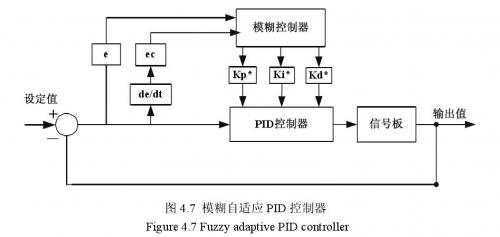
由于設計的電子負載只用到P和I兩個參數,所以研究中,是在運行中通過不斷的檢測e和ec,運用模糊規則進行模糊推理,對P和I兩個參數進行在線修改,從而使被控對象具有良好的動、靜態性能。
模糊控制設計的核心是總結調試人員的技術知識和實際經驗,根據現場的要求及被控對象的實際情況來選定模糊控制器的輸入、輸出變量,選取變量的論域和隸屬度函數,建立合適的模糊規則表,通過查詢模糊矩陣表解模糊后進行參數調整。Kp和KI的模糊規則表見表4.3和表4.4.
(1).輸入/輸出變量的論域在電子負載控制系統中,負載電流值偏差e和偏差變化率ec(以恒流高檔位為例),其實際論域(基本論域)分別為
設定值為6A,取偏差值e的基本論域為(-0.04,0.04),偏差變化率ec的基本論域為(-1,1)。控制量的基本論域為(-1,1)。控制量的基本論域為
其基本論域的選擇(根據經驗值獲得)分別為:K*P∈(-0.035,0.035)和K*I∈(-1.35,1.35)。
在具體選擇模糊變量論域時,既要考慮到各模糊子集能夠很好地覆蓋論域,又要防止出現失控現象,同時又不能夠隨意地增加論域中元素的個數。如果論域中元素過多,雖然系統的控制精度得到提升但是卻大大地增加了DSP工作量可能會導致系統的運行速度過慢。因此,選擇具體的模糊變量論域時,必須兼顧論域的覆蓋率及DSP的運算能力,其實際值在本系統中為(-6,-5…0,1,…6)十三個等級。
(2)。量化因子和比例因子
控制系統每次采樣獲得的采樣值都需要乘上一個相應的因子,使得輸入變量能夠從其實際論域轉換到模糊論域中,這就是量化因子K的概念。一般地,用Ke,Kec分別表示系統的偏差e和偏差的變化率ec的量化因子。根據前述可知,電流偏差e和偏差變化率ec的實際論域分別為(-|emax|,|emax|)及(-|ecmax|,|ecmax|),所有變量的模糊論域同為(-n,-n+1,…0,1,…n)那么,Ke、Kec可由下式確定,即:

通過模糊推理獲得的輸出不能直接作用于被控對象必須通過解模糊接口將其轉換為被控對象所識別的基本論域中。由前述可知系統控制量的基本論域為

則其比例因子Kup、Kui分別為:
獲得了比例因子之后,最終輸出給被控對象的任一實際控制值可以由下式求得:
其中K*P、K*I分別表示模糊控制器最終輸出給PID控制器參數的調整因子。
根據以上給出的公式及數據,可以分別求出本系統的量化因子和比例因子,Ke =150,Kec = 6,Kcp = 0.006,Kui = 0.225.輸入e和ec量化表如下表4.1所示。
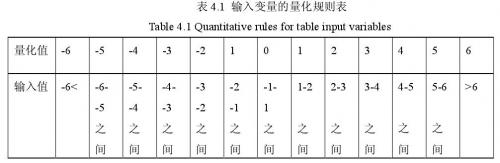
(3)知識庫輸入、輸出變量的模糊子集選取為:負大、負中、負小、零、正小、正中、正大(NB、NM、NS、ZO、PS、PM、PB),確定了模糊語言變量之后,接下來選擇各變量的隸屬函數。一般地,隸屬函數有三角形、高斯型、梯形等。對于隸屬函數的選擇,目前也沒有完整的定論可以說明針對哪種控制對象使用何種隸屬函數是最優的。因此,選擇隸屬函數一般都是根據經驗或從計算簡便上考慮。誤差和誤差變化率輸入、PID參數的輸出變量的隸屬函數均選取為三角形隸屬函數,統一使用下面隸屬函數圖4.8.

pid控制相關文章:pid控制原理
51單片機相關文章:51單片機教程
pid控制器相關文章:pid控制器原理
電子負載相關文章:電子負載原理









評論