基于 DSP 的電子負載:模糊自適應整定 PID 控制策略

由隸屬函數表通過計算三角形的直線方程可以很方便的計算出各變量的隸屬函數表如下圖4.8所示。
本文引用地址:http://www.j9360.com/article/270110.htm
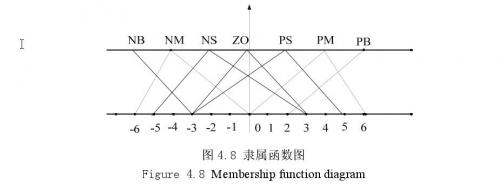
表4.2所示。其中“B”表示任意的輸入、輸出變量。利用該隸屬函數表就可以直接求出已轉換到模糊論域中的輸入變量的模糊語言值。

規則庫的作用是用來存放全部模糊控制規則的,在進行推理時為“推理機”提供控制規則。模糊控制器的規則庫是以專家知識和手動操作人員長期積累的經驗為基礎,按照人的直覺推理所形成的一種語言表示形式。模糊規則一般由一系列的關聯詞連接而成,如if-then, else, also, end, or等,關聯詞必須經過“翻譯”才能將模糊規則數值化。建立模糊控制規則時遵從以下幾點原則。
a.系統剛投入工作時,偏差e較大,為了提高系統響應速度,必須取較大的比例值,即模糊控制器輸出較大的K*P.同時,應減小系統的微分作用,以防止系統的微分飽和,即模糊控制器輸出較小的K*i.
b. e*ec>0時。此時,偏差朝著絕對值增大的方向變化。當系統處于跟隨狀態時(e與ec大小適中),此時模糊控制器應輸出較小的K*P,中等大小的K*i.若此時絕對偏差較大,應增大比例值,減小積分作用,即對系統采取較強的控制措施,改變誤差的變化方向。若絕對偏差較小,說明系統的偏差不大,此時的控制的主要目的在于消除靜差,防止震蕩。因此,比例值取適中值,增強積分作用。
c. e*ec此時,偏差e與其變化率ec方向相反,說明系統偏差朝著絕對值減小的方向變化。當絕對偏差較小時,減小比例值,消除靜差、防止超調使系統獲得良好的動態性能。若絕對偏差較大,則應適當增強比例值,提高系統的響應速度。取較小的積分值以保證系統的穩態性能。
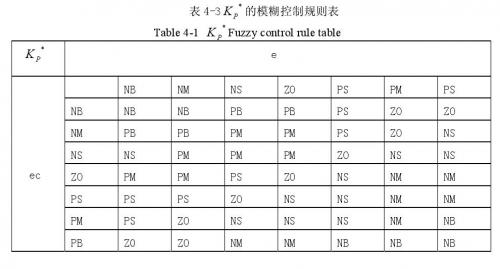
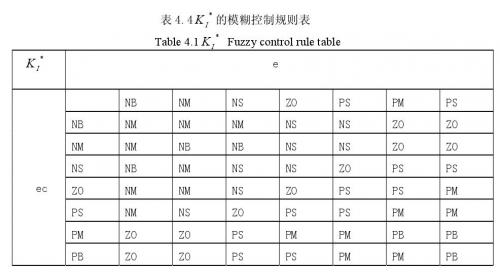
將以上的分析結果與電子負載控制系統的實際操作經驗相結合,并用模糊語言描述就可以,形成下面K*P和K*i的模糊規則表,見表4.3和表4.4.
獲得了模糊控制規則表之后,通過馬丹妮模糊推理法及加權平均法(解模糊方法)在MATLAB中的模糊控制箱中可以直接求得模糊控制輸出查詢表,如表4.5所示。根據模糊合成推理設計PID參數的模糊矩陣表,DSP查表運算對PID實施在線的調整。初始PI參數值設為K'P =0.6,K'I =2.7.本文只給出表4.5是K*P的模糊輸出響應表,K*i的同時由MATLAB動態仿真工具箱生成。
最終的
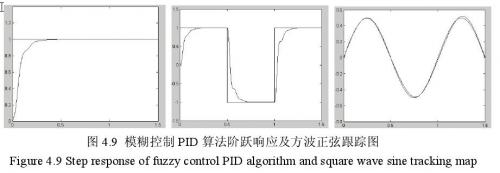
在MATLAB下利用編寫M語言對電子負載模型做階躍響應和正弦跟蹤測試仿真4.9所示。


pid控制相關文章:pid控制原理
51單片機相關文章:51單片機教程
pid控制器相關文章:pid控制器原理
電子負載相關文章:電子負載原理









評論