視頻跟蹤算法在Davinci SOC上的實現與優化

引言
本文引用地址:http://www.j9360.com/article/269186.htm目標跟蹤作為計算機視覺的一個極具挑戰性的研究任務,已被廣泛的應用在人機交互、智能監控、醫學圖像處理等領域中。目標跟蹤的本質是在圖像序列中識別出目標的同時對其進行精確定位。為了克服噪聲、遮擋、背景的改變等對目標識別帶來的困難,出現了很多的跟蹤算法。
因為目標跟蹤算法需要處理的數據量大、運算復雜,需要性能強大的處理器才能實時處理。我們選用TI推出的最新產品TMS320DM6446實現算法。TMS320DM6446是一款高度集成的片上系統,集成了可以運行頻率高達594MHz的C64x+ DSP核和297MHz的ARM926處理器核。另外它還集成了數字視頻所需的許多外部組件,如視頻加速器,網絡外設及高速外部存儲接口。本設計充分利用DM6446的強大運算能力,在DSP內核上實時運行目標跟蹤算法。 設計還在ARM處理器上執行多線程應用程序,負責視頻采集,顯示,網絡通信,外圍器件控制等工作。
算法介紹
本系統實現的視頻跟蹤算法可參考文獻[1]-[5],整個算法分為基本算法和改進算法兩部分。本算法是一種基于模板匹配技術的跟蹤算法,即在手工選定或自動選定了待跟蹤目標后,提取目標的外觀信息作為模板,在后續的視頻序列中,將候選圖像區域與目標模板進行匹配,將最相似的圖像區域作為運動目標當前的位置。在本文中,采用結構相似度,即“歸一化互相關系數”作為候選區域與目標模板相似程度的度量標準,其計算公式如下所示:
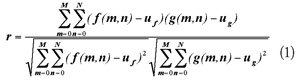
上式中,f(m,n)和g(m,n)分別為目標模板和候選區域的灰度值矩陣,尺寸為MxN。uf和ug分別為目標模板和候選區域的灰度平均值,然后再求出f(m,n)和g(m,n)的協方差、f(m,n)的方差、g(m,n)的方差后,求出歸一化互相關系數。式(1)通過從灰度值矩陣中減去灰度均值,有效地消除了光照給跟蹤結果帶來的影響。而對于匹配圖像區域的搜索,為了達到減少匹配次數從而降低計算量的目的,我們借鑒了視頻壓縮領域中的三步搜索法(Three Step Search, TSS) 作為最匹配點的搜索算法[2]。
為了增加模板匹配視頻目標跟蹤算法的魯棒性,我們在基本算法的基礎上實現了改進算法的部分。改進算法具有自適應遮擋處理與模板漂移抑制的能力,能夠很好地解決前面提到模板匹配的視頻目標跟蹤算法需要解決的難題。具體來說,主要有如下四點改進:(1) 抑制漂移的帶掩蔽卡爾曼外觀濾波算法(Drift-Inhibitive Masked Kalman Appearance Filter, DIMKAF ) [1][3][4] ;(2) 內容自適應漸進式遮擋分析算法(Content-Adaptive Progressive Occlusion Analysis, CAPOA)[1][5];(3) 可變掩蔽模板匹配算法(Variant-Mask Template Matching, VMTM)[1][5];(4) 局部最優匹配鑒定算法(Local Best Match Authentication, LBMA)[1]。 改進后整個算法的流程圖如下所示:
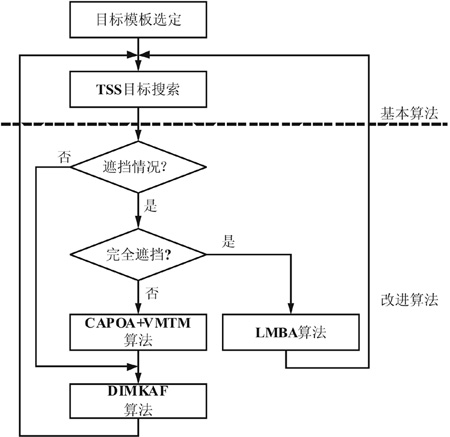
圖 1 跟蹤算法主流程圖











評論