基于ARM的液壓系統智能數據采集終端硬件設計

針對液壓系統的特點,設計了基于ARM的智能數據采集終端系統。該系統通過傳感器對油壓、流量和溫度3類信號進行采集,調理后的數據經過ARM處理器S3C2440進行處理和壓縮,壓縮后的數據利用GTM900C無線傳輸模塊遠程傳輸。整個系統硬件電路分為主控電路部分、數據采集部分和無線傳輸部分。
液壓系統具有功率大、響應快及精度高等特點,已經廣泛應用于冶金和制造領域。但其故障又具有隱蔽性、多樣性、不確定性及因果關系復雜等特點,故障出現后不易查找原因,而且故障發生會帶來巨大的經濟損失。通常,液壓系統只能靠定期檢查和維護來排除故障,這種方法有一定的滯后性。因此需要實時監測液壓系統的狀態數據并及時分析以減少故障率,確保工程機械正常、連續運行。傳統單片機已廣泛應用于數據采集和處理中,雖然其價格便宜、易于開發,但是在存儲空間和網絡傳輸方面往往難以滿足工程上的要求。因此,筆者針對液壓系統采用了基于ARM的數據智能采集終端。
采集終端通過分布在液壓系統各處的傳感器對油壓、流量和溫度3類信號進行采集,并將采集到的信號進行濾波、放大,然后模數轉換,數據經過分析后進行統一的編排與壓縮,最后通過通信模塊進行傳輸,將數據傳輸到本地監控中心做進一步故障診斷。
1硬件總體結構
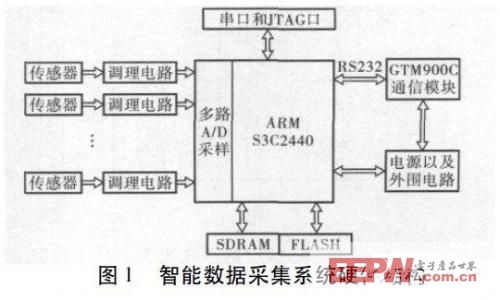
智能數據采集終端系統采用三星的ARMS3C2440為主控芯片、GTM900-C GPRS為通信模塊。整個硬件系統分為3部分:主控模塊、數據采集模塊和通信模塊,具體結構如圖1所示。
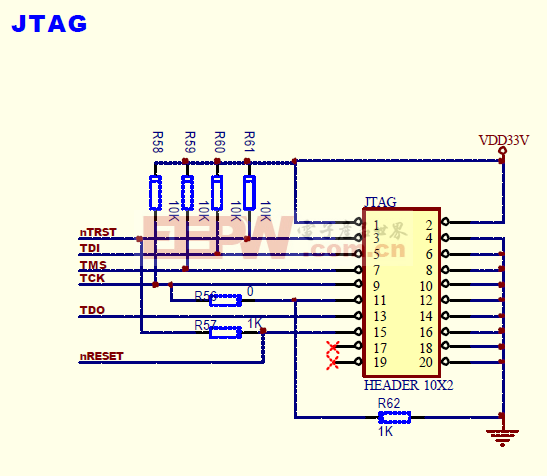
終端的主控模塊包括控制芯片電路、存儲電路、電源電路以及串口和JTAG接口電路;數據采集模塊包括傳感器電路、信號調理電路以及8路A/D轉換電路;通信模塊包括GPRS芯片以及外圍電路。其中ARM與GPRS之間的通信是通過RS-232總線完成。
2主控模塊設計
2. 1 ARM芯片介紹與工作狀態設置
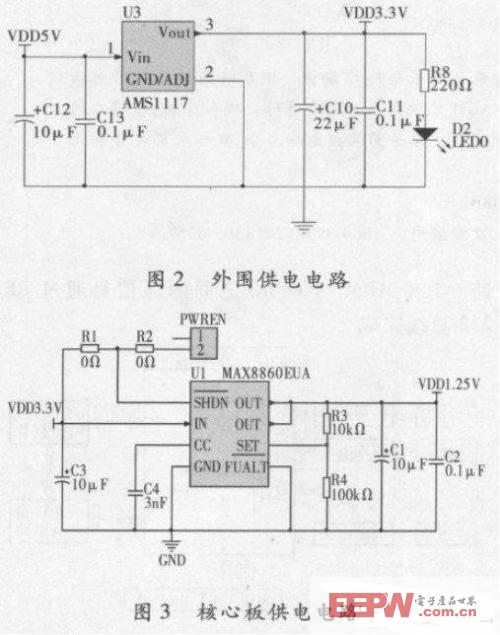
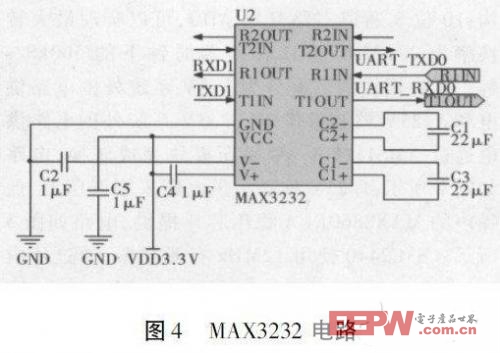
終端系統主要采用以ARM920T為核心的三星S3C2440芯片。該芯片雖然功耗低、體積小,但是集成了豐富的片上資源。其特點主要有增強型ARM架構MMU,支持WinCE、EPOC32和LINUX;內部先進微控器總線架構;哈佛高速緩沖體系結構;10位8通道多路復用ADC,可以實現最大轉換率為2. 5MHz A/D轉換器時鐘下的500kS /s等。主控模塊的供電分為3. 3V系統外圍電路供電和1. 25V核心板供電。3. 3V系統外圍電路供電通過AMS1117-3. 3V穩壓模塊完成轉換,電路如圖2所示;1. 25V核心板供電則采用低壓差、低噪聲的MAX8860EUA穩壓芯片提供,電路如圖3所示。S3C2440使用12MHz有源晶振,通過片內PLL電路倍頻后,最高可達到400MHz.片內的PLL電路兼有頻率放大和信號提純功能,因此,系統可以以較低的外部時鐘信號獲得較高的工作頻率,避免了高頻噪聲的產生。復位電路采用MAX811S芯片,當系統電源低于系統復位閾值(2. 93V),芯片將會對系統進行復位。
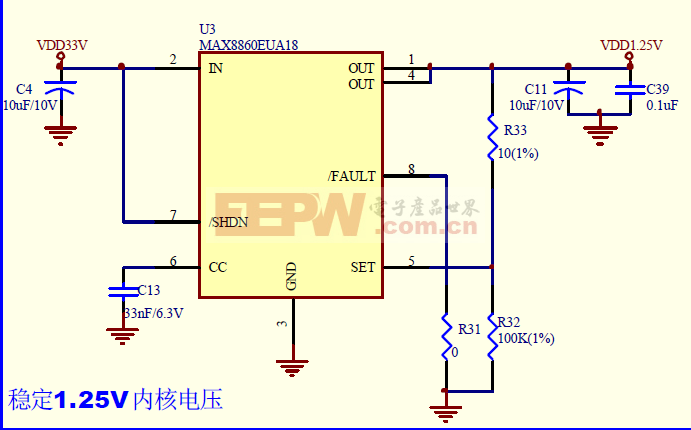
2. 2串行接口電路
RS-232C標準常用的接口是9芯D型,然而最基本的通信只需要RXD、TXD即可,但是由于RS-232C標準所定義的高低電平信號與S3C2440系統的定義不同,所以兩者之間的通信需要電平轉換,在單片機中常用的是5V的MAX232,而這里使用3. 3V的MAX3232,典型的應用電路如圖4所示。
2. 3 NOR FLASH接口電路
終端系統中NOR FLASH使用的存儲芯片是HY29LV160,存儲容量為2MB,工作電壓為2. 7 ~3. 6V,工作方式選用16位數據寬度模式。需要注意的是管腳NC接高電平時,即為16位數據位,當NC為低電平時即為8位數據位。選擇16位數據寬度時,即為半字模式,此時16位數據總線D0 ~ 15分別接S3C2440的數據總線DATA0 ~15,地址總線則是A0 ~ 19分別與S3C2440的ADDR0~ 19連接,半字模式下的尋址范圍為1MB,對于32位的S3C2440尋址范圍則為1×2 = 2MB.
2. 4 SDRAM接口電路
SDRAM選用的是K4S561632,其存儲容量為32MB,工作電壓為3. 3V,其數據寬度為16位。
根據系統要求,需要有相對較復雜的算法運行,所以選用兩片組成存儲系統,存儲空間為64MB.
具體連接方法是第一片的D0 ~ 15接DATA0 ~15,第二片的D0 ~ 15接DATA16 ~ 31,這樣將16位擴展成為了與S3C2440對應的32位數據總線。
對于地址線來說,SDRAM采用的是存儲陣列,即每片分為4個邏輯Bank,每個Bank由13個行地址線和9個列地址線共同尋址,能訪問的空間為4×213×29×2 = 225MB.地址線的接法是分別將兩片的A0 ~ 12與ADDR2 ~ 14相連,通過RAS和CAS選擇行列信號,通過BA0、BA1選擇Bank,最終通過CS通用片選實現64MB的尋址。








評論