基于DSP芯片TMS320F240的步進電機調(diào)焦系統(tǒng)設(shè)計

F240初始化后,計時器的基本計時時間為0.1?s,考慮到F240定時器是16位計數(shù)器,這難以滿足計算長時間的需求,所以采用通 過計算進入定時器中斷的次數(shù)來計算長時間的方法。例如設(shè)置定時器周期寄存器值為800即*T1PR=800,那么進一次定時器中斷時間為800*0.1= 80?s如果計時為1s的話,則只需進12500次中斷即可,以此類推;故定義的數(shù)組內(nèi)容表示如下:
int table[ ]= { 25,800,255, //第1行
. . . . . . } //第n行
其中25為電機步數(shù);800為定時器周期寄存器值;255每兩步間所要進入定時器中斷的次數(shù)。實現(xiàn)準(zhǔn)確地控制步進電機控制器關(guān)鍵在于由F240 I/O口產(chǎn)生規(guī)定的脈沖信號,提供給步進電機控制器從而驅(qū)動步進電機正確轉(zhuǎn)動,程序中包括F240初始化、電機正轉(zhuǎn)、等待、電機反轉(zhuǎn)幾個程序模塊。程序流 程圖如圖2所示:
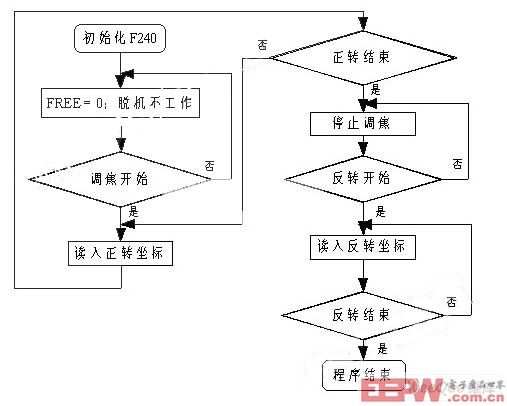
圖2 程序流程圖
以下是實現(xiàn)電機正轉(zhuǎn)的程序。程序中變量解釋:step:用于存儲數(shù)組中電機步數(shù);every step:用于存儲數(shù)組中每兩步間所要進定時中斷的次數(shù);flag:數(shù)組行數(shù)標(biāo)志(程序假設(shè)需正轉(zhuǎn)36組)。
void interrupt INT2_ISR()
{ while (*EVIVRA==0x0027) //是否是定時器中斷
{ if(flag36) //用來完成正轉(zhuǎn)
{
if (steptotal==step) //是否走完數(shù)組每行規(guī)定的步數(shù)









評論