基于DSP芯片TMS320F240的步進電機調焦系統設計

本系統的硬件接口電路如圖1所示,74ls14為反相器,接到DSP的I/O口以提高其驅動能力,CH1是一個八腳的插頭,用于外接步進機的各項繞 組。步進電機以及攝影鏡頭部分從略。工作過程如下:首先獲得攝影調焦曲線,利用MATLAB軟件,得出時間位移坐標,再換算成步進電機轉動所需的步數時間 坐標,以數組的行式保存下來。在F240的數據存儲器中開辟空間存儲步數時間數組,利用F240定時器完成計時,I/O口輸出相應寬度的脈沖信號,驅動步 進電機驅動器UP-4HB03M,其中CP為步進脈沖輸入端;FREE為脫機端,高電平有效,FREE=1時,電機處于釋放狀態;V/D為方向控制端,高 低電平分別控制電機正反轉。
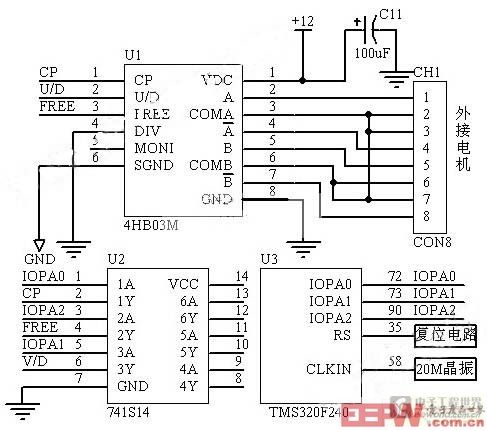
圖1 硬件接口電路圖
3 軟件設計:
由于電機的運行和轉動步數以及兩步之間間隔時間有關系,故采用計時器計時的方法來計算時間,F240初始化程序如下:
void Initcpu(void) //初始化F240程序
{ *WDCR=0x6f; // 禁止自帶的看門狗功能;
*CKCR1=0x69; // 外部輸入晶振為20MHZ,F240工作在20MHZ;
*CKCR0=0xc3; // 系統時鐘為10MHZ;
*SYSCR=0x4000; } // F240輸出頻率CLKOUT=IOPC1(I/O管腳);









評論