電動汽車分布式電機驅動測試系統研究與應用

使用IMC公司生產的imc C1數據采集器作為系統數據網關,它標配有2個CAN節點,8路模擬輸入通道和支持TCP/IP協議的Ethernet接口。機械特性子系統和內部信息調試子系統分別通過兩路獨立的CAN總線、環境監測子系統通過多路模擬通道連接到imc C1。最后,這三個子系統的所有數據經imc C1的以太網口傳輸到測控計算機。系統數據流圖如圖3所示。
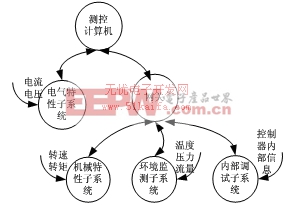
圖3 測試系統數據流圖
3 關鍵技術研究
監測系統軟件開發環境采用美國NI公司的虛擬儀器開發軟件Labview7.0。它采用圖形化編程語言,提供了大量功能函數,有助于提高程序可靠性和開發效率。
系統開發包括軟硬件平臺搭建、數據采集與處理、數據信息管理、軟件界面設計和系統可靠性與誤差分析等方面的工作,本文對其中的幾點關鍵技術予以詳述。
3.1 GPIB通信
通用接口總線GPIB(General Purpose Interface Bus)是高速率8位并行數字接口,已成為IEEE 488標準。
本文采用NI公司的PCI-GPIB接口卡,最高傳輸速度可達1.5Mbytes/s。待集成的D6000功率分析儀可進行終端電量的測量和分析,它的組件61D2模塊包含GPIB接口。
軟件使用LabVIEW下的VISA相關函數實現GPIB通訊,VISA資源名稱為GPIB:6。用到的接口函數有:SH1, AH1, T5, L4, SR1, RL1, PP1, DC1, DT1, C0, E2。
本文采用模塊化編程,各模塊功能如下:
初始化:包括獲取儀器地址,重置,選擇工作模式。
儀器設置:設置采樣頻率,設置平均方式,超時時間設定。
觸發:觸發源設置,觸發方式,軟件觸發。
數據設置:設置功率分析儀,讀取所測變量。
讀取并顯示數據:使用“RED?”指令和VISA的Write和Read函數讀取數據,并進行格式轉換。
出錯信息顯示:出現錯誤時予以提示,并指出數據流出錯環節。
關閉儀器:關閉總線I/O接口。
3.2 CAN通信
CAN總線(Controller Area Network)是一種具有很高保密性、有效支持分布式控制或實時控制的串行通信網絡,目前在工業控制尤其是汽車工業中得到廣泛應用。
完整的CAN總線通信接口的硬件部分應包括CAN收發器、電氣隔離部分、CAN控制器等。本系統使用了2路CAN總線,分別制訂兩個不同的協議,以實現兼容,防止沖突。使用CRONOS PL/2 UNI8數據采集器作為兩路CAN總線的網關。連接機械特性測試子系統的CAN總線命名為CAN0,其協議規定了轉矩和轉速的信息格式,內部信息調試子系統的CAN總線命名為CAN1,用于傳輸控制器內部運行參數和控制命令等。
其CAN通訊流程圖如圖4所示。
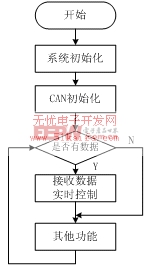
圖4 CAN通信程序流程圖
3.3 系統誤差分析









評論