3S3P汽車尾燈(RCL) LED驅動器參考設計

綜述
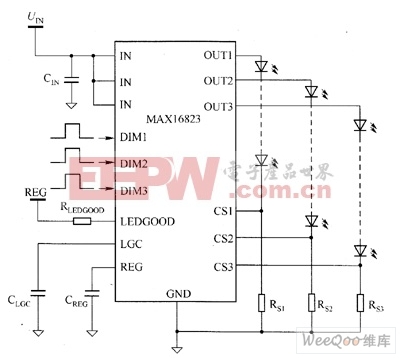
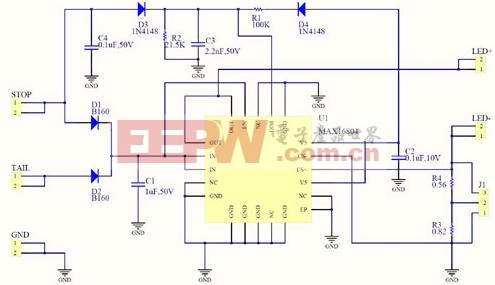
該參考設計采用MAX16823 3通道線性LED驅動器和外部BJT,實現3S3P RCL驅動電路。圖1和圖2給出了PCB和安裝了散熱器的圖片;圖3為參考設計的電路板布局;圖4為參考設計的原理圖。
以下詳細討論了該參考設計,給出了主要功能電路的分析、設計規格以及測試數據。
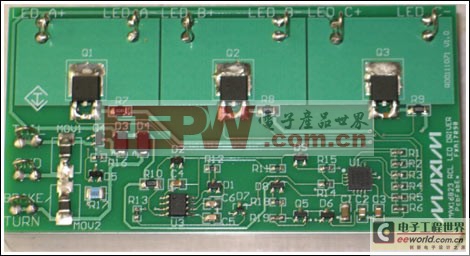


圖3. LED驅動器布線
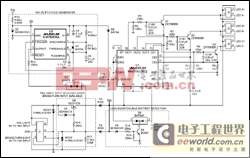
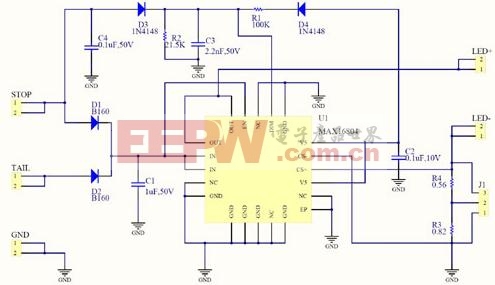
圖4. LED驅動器原理圖
設計分析
參考設計由四部分電路組成:輸入保護電路與輸入選擇器、10%占空比發生器、拋負載和雙電池檢測、LED驅動電路。
輸入保護
輸入保護主要由金屬氧化物變阻器MOV1和MOV2提供。設計中,我們采用了Littelfuse的V18MLA1210H (EPCOS也提供高質量的MOV器件)。根據具體應用環境選取不同額定焦耳的MOV。
輸入選擇器
輸入電壓建立后,除非剎車燈/轉向燈輸入端作用有效電源,否則,輸入選擇器將電源切換到尾燈節點。一旦電源為剎車燈/轉向燈輸入供電,輸入選擇器將自動屏蔽尾燈輸入電流。這種架構將為剎車燈/轉向燈輸入提供600mA電流,指示RCL功能。當LED驅動器發生故障或者LED本身發生故障時,MAX16823將徹底關斷所有LED,此時只有不足5mA的電流流出剎車燈/轉向燈。燈的輸出級電路能夠成功檢測到這一低電流,根據設計要求發出報警信號。
D5、R16組成檢測電路。當尾燈輸入節點電壓為9V或更高電壓,并且剎車燈/轉向燈輸入節點接地或為高阻時,該檢測電路打開Q4。輸入電壓通過二極管D3加載到VIN,提供LED驅動器的主電源。當剎車燈/轉向燈輸入電壓達到尾燈電壓的2V以內時,Q4斷開,VIN通過二極管D4供電。R17提供2.1kΩ對地電阻,確保此節點的最大阻抗。R17在雙電池條件下(24V)功率達到270mW,所以必須選取0.5W功率的電阻。這個電路的主要限制是:當剎車燈/轉向燈和尾燈同時工作時,假設剎車燈/轉向燈輸入電壓與尾燈輸入電壓的差值在2V以內。
10%占空比發生器
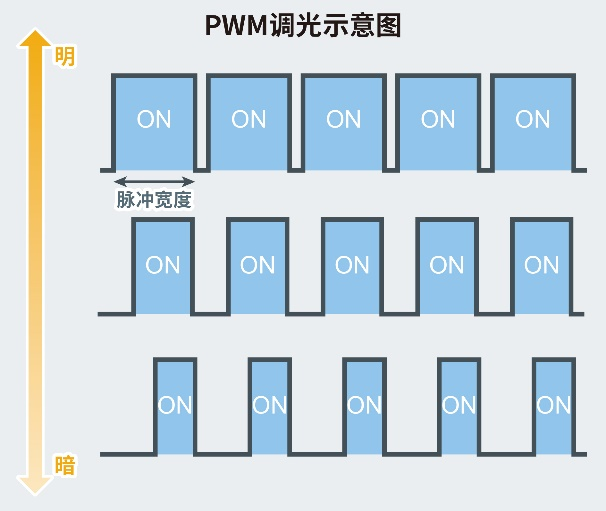
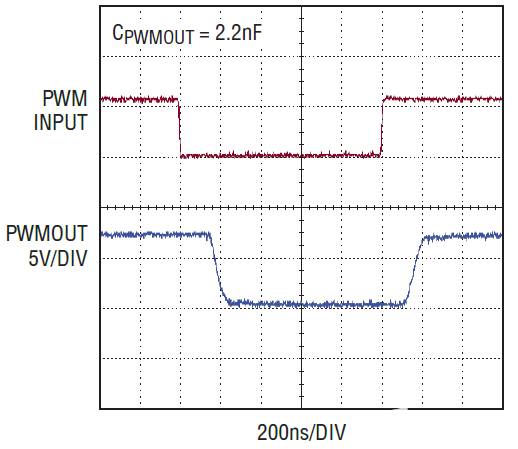
10%占空比發生器產生占空比為10%的方波信號,該信號送入MAX16823 LED驅動器,用于調節LED亮度。只要尾燈輸入端提供有效電壓,調光電路將有效工作。R10和D2提供5.1V穩壓源,用于U3 (ICM7555ISA)供電。雙電池條件下,由于功耗可能達到44mW,所以R10必須選取0.25W功率的電阻。定時器U3配置為非穩態振蕩器,導通時間由通過D1和R11對C6充電的時間決定(tON = 0.693 × R11 × C6 = 0.418ms [典型值]);關斷時間由通過R12對C6放電的時間決定(tOFF = 0.693 × R12 × C6 = 3.8ms [典型值])。導通時間和關斷時間之和構成周期大約為237Hz的方波信號,占空比為9.9%,圖5為占空比周期。
電阻R13提供限流保護,降低該開關節點可能產生的EMI輻射。R13的物理位置應盡量靠近U3,以降低EMI。占空比為10%的方波信號通過D7和R14耦合至U1。只要剎車燈/轉向燈沒有有效電源,D7提供的邏輯“或”電路將允許10%占空比脈沖通過。這種配置在尾燈輸入作用有電源電壓時,提供較低的LED亮度。而當剎車燈/轉向燈輸入作用有效電壓時,D7將電壓提供至DIM1、DIM2和DIM3輸入,使LED亮度達到100% (高LED亮度)。因為LEDGOOD信號不能超出6V,電阻R14將電流限制在2mA以內,D9和D2提供電壓箝位,避免過高的節點電壓。當D7陽極沒有作用電壓時,電阻R15為下拉電阻。使用400kΩ電阻時,R15將保持DIM節點電壓低于0.6V,此時的吸電流為1.5μA—遠低于DIM輸入的0.1μA源出電流。
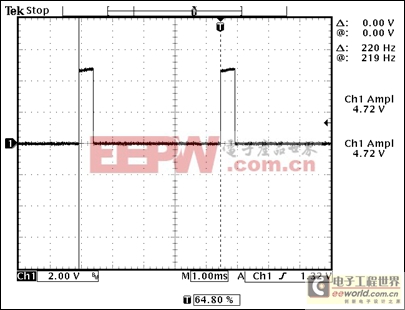
圖5. 振蕩器輸出




評論