燃料電池汽車整車控制器硬件在環實時仿真測試平臺設計

隨著汽車工業的發展和進步,人們對汽車的動力性、經濟性、安全性及排放等方面提出了更高的要求,傳統的機械式控制系統已經遠遠不能滿足這些需要。電子化控制系統以其高精度、高速度、控制靈活、穩定可靠等特點逐漸取代了機械式控制系統,是汽車控制系統的發展趨勢。
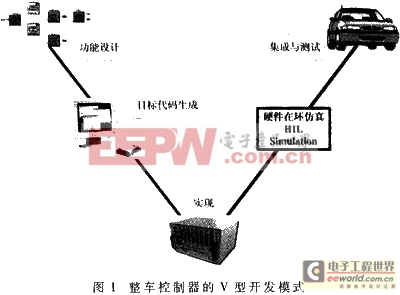
由于對控制性能的要求越來越嚴格,使得汽車電子控制系統對控制器的要求越來越高。控制器的開發與設計一般都要經過如圖1所示的步驟,即由上層到底層,再由底層到上層的一個V字形過程。首先是控制器的上層功能設計,詳細確定控制器將要實現的功能;然后生成目標程序代碼;最后是控制器的底層軟、硬件實現。
從控制器實現到實車測試的過程中還需要進行硬件在環實時仿真測試。這是因為在整車控制器的開發過程中,利用整車控制器硬件在仿真測試平臺構建虛擬的整車現場環境。對控制器進行硬件在環仿真測試,不但可以大大加快整車控制器軟、硬件的開發過程,而且開發成功的控制器具有較高的可靠性。因為仿真測試平臺可以模擬出在實車試驗中難以實現的特殊行駛狀態和危險狀態,從而對整車控制器進行全面的測試。控制器硬件在環仿真測試中,系統用數學模型來代替,控制器使用實物,系統模型和控制器之間的接口要與實際保持一致,在仿真調試完畢后,達到控制器和系統之間的“垂直安裝”或“垂直集成”。控制器在完成硬件在環仿真之后,就可以進入系統集成和測試環節,最后實現初期設計的各項功能和指標。
本文基于Matlab/Simulink RTW和XPC Real-time Target實時仿真平臺,配合PCI數據采集卡底層軟件的開發和信號調理裝置硬件設計,系統地實現了燃料電池汽車整車控制器仿真測試平臺。利用該平臺可以對整車控制器硬件電氣特性、底層軟件平臺和控制算法等進行測試。
硬件在環實時仿真測試平臺方案設計
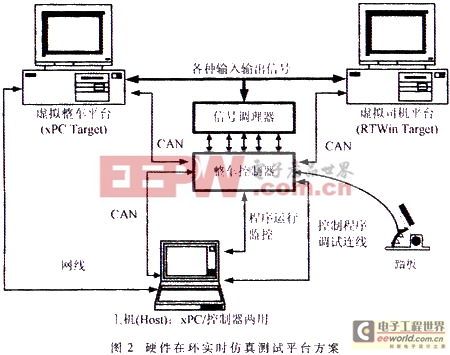
硬件在環實時仿真平臺構建了虛擬的整車環境,并基于虛擬的人機交互司機模型,將人作為硬件在環的一個元素引入到實際的仿真測試中,具體結構如圖2所示。兩個基于工業控制計算機的虛擬平臺分別為虛擬整車平臺和虛擬司機平臺。虛擬整車平臺基于Matlab/SimulinkxPC Target實時仿真環境,作用是模擬真實燃料電池客車的運行,為測試整車控制器提供所需的虛擬控制對象。虛擬司機平臺基于Matlab/Simulink RTW Target實時仿真環境,作用是模擬真實燃料電池客車的操控機構,配合加速踏板為測試整車控制器提供所需的虛擬駕駛環境。當兩個計算機虛擬平臺對實際環境進行模擬時,通過數據采集卡、CAN通訊卡與可配置的信號處理裝置相連,可配置的信號處理裝置對信號進行處理,從而實現真實的復雜整車環境,直接與整車控制器連接進行仿真測試試驗。并配有基于CAN總線的實時監控裝置,可以全過程實時地監控仿真測試試驗。
硬件在環實時仿真測試平臺硬件設計
虛擬平臺硬件設計
虛擬平臺的硬件需要完成計算機模型產生的虛擬信號到真實信號的轉換,這些信號包括數字量輸入輸出信號、模擬量輸入輸出信號和CAN通訊信號。例如燃料電池發動機啟動開關信號屬于數字信號,電機轉速信號屬于模擬信號,而控制器控制命令通過CAN總線網絡進行傳送。

評論