基于Cortex-M3的車輛通訊監控終端的設計與實現

引言
本文引用地址:http://www.j9360.com/article/233870.htm 安裝在挖掘機的遠程監控終端,將嵌入式、現場總線分布式控制與 GPS 遠程監控系統等技術應用于履帶式液壓挖掘機。由于履帶式液壓挖掘機售價額昂貴,在銷售過程中主要采取按揭、分期或融資租賃的銷售方式,這種銷售方式有較多銷售風險,廠家缺乏強制手段,不能有效控制還貸風險。采用了嵌入式、GPS和GSM等技術為基礎的遠程監控系統是利用技術手段來控制這種風險的有效措施之一。

另一方面,終端實時采集車輛數據,以無線通訊形式傳輸數據,公司售后服務人員可以通過Internet 隨時監控每一臺挖掘機的工作狀態,為技術人員提供了車輛在使用過程中的車輛監控、車輛運行管理 、車輛健康管理(實時報告)、機械維護和服務管理、通知服務、機械融資管理自動化支持等各類功能,提高了企業的信息化管理水平和監督能力。
1 車輛現場監控終端與服務系統的總體結構
1.1 總體結構
工程機械車輛現場監控終端與服務系統的總體結構(如圖1 所示),

其控制原理是利用車載硬件終端PL-LRC,實時精確采集車輛各傳感器工作數據、GPS 定位數據等,按照設計的通訊協議,通過商業GSM通訊網絡,將車輛信息以短信形式發送到生產廠家服務器上,存儲在服務器數據庫中[1] 。利用數據信息,可以定期形成相關的數據分析報告,管理員或用戶也可在任意一臺接入因特網的計算機上使用 IE 瀏覽器,獲得大量的車輛位置信息和工作數據,并根據這些數據,對運行中的車輛進行遠程控制、診斷和維護。
1.2 PL-LRC車載硬件終端設計
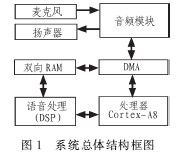
需要開發的PL-LRC車載硬件監控終端包括硬件開發和軟件開發,以及測試。硬件系統的工作原理如圖2所示。
PL-LRC車載硬件監控終端由微控制器模塊、無線通信與定位模塊、電源控制模塊、CAN總線接口模塊等部分組成。本文主要介紹監控終端的開發與實現。
2 硬件設計
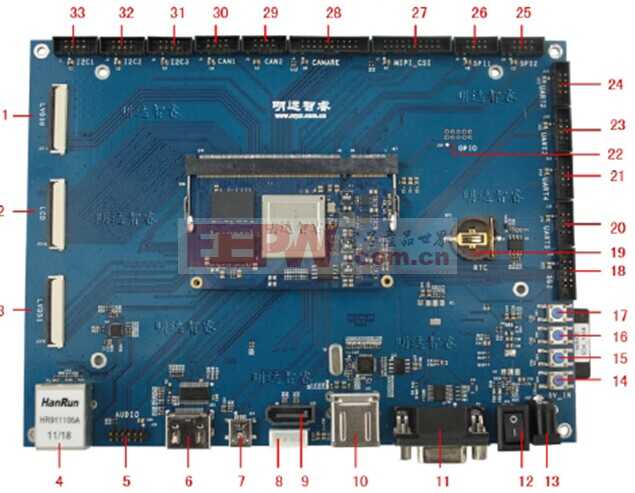
車載終端硬件主要由控制模塊Cortex-M3 內核處理器、GPS模塊、存儲模塊、CAN收發器、JTAG模塊和電源模塊等組成[2] ,車載終端硬件設計框圖如圖3所示。

控制模塊采用STM32 系列具有性能高、成本低廉、功耗低的特點,是針對嵌入式應用 ARM Cortex-M3 內核而設計的,本系統設計中采用STM32F103RBT6,其中增強型的是同類中性能最高的,時鐘頻率達到 72MHz,通信接口有 2個I2C接口、3個UART接口、USB2.0接口、2個SPI接口、CAN接口設計用于手持和通用嵌入式系統,支持基于JTAG的系統調試,完全能滿足車載終端的系統需求[3-4] 。
無線通信與定位模塊的工作環境嚴酷,工作要求嚴苛,工作室震動、沖擊強烈,電磁環境惡劣,可靠性要求極高,本設計對這些要求給以特別關注,在設計時采用了Telit公司的GM862-GPS模塊。
該模塊是Telit產品中最先進的型號,是典型的功能卓越的M2M通信模塊。產品采用加固/耐用設計,工業級寬溫,內建SIM卡插槽,MMCX RF接口,干擾監測,內嵌TCP/IP(含TCP/IP、UDP、FTP、SMTP協議)協議棧,自動掃描頻段(無SIM卡),集成20通道、高靈敏度SiRFstarIII GPS接收器,具有850/ 900/1800/1900 MHz 四波段GSM/GPRS調制解調, SIM卡訪問控制(SAP)及內置Python1.5.2+解釋。GM862-GPS同時支持IIC和SPI接口,可直接擴展外部部件,如傳感器、攝像頭、顯示器等[5] 。

光耦相關文章:光耦原理
萬用表相關文章:萬用表怎么用
數字通信相關文章:數字通信原理
通信相關文章:通信原理
波段開關相關文章:波段開關原理
斷路器相關文章:斷路器原理
高壓真空斷路器相關文章:高壓真空斷路器原理 漏電斷路器相關文章:漏電斷路器原理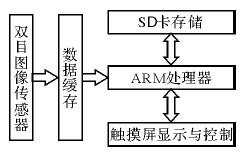





評論