設計高性能低功耗三相無刷直流電機控制系統

BLDC 電機通過什么驅動?
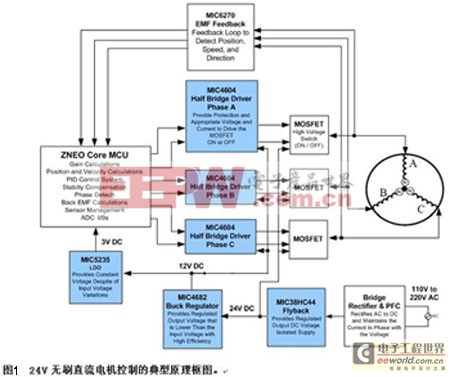
本文引用地址:http://www.j9360.com/article/227479.htm有幾種方法可用于驅動 BLDC電機;一些基本系統要求如下所列:
a.大功率晶體管。這些通常是場效應管 (MOSFET) 或絕緣柵雙極晶體管 (IGBT),可承受高壓(滿足電機的要求)。多數家電使用的電機功率為 1/2 至 3/4 馬力(1 馬力=734 瓦特)。因此,典型電流能力可達到 10A。對于高壓系統而言(通常 >350V),可使用 IGBT。
b.MOSFET/ IGBT 驅動器。通常,可使用一組 MOSFET/ IGBT 驅動器。可選擇“半橋”驅動器或三相驅動器。這些解決方案能夠操作的電壓必須為電機電壓的兩倍,以應對電機產生的逆電動勢 (EMF)。此外,這些裝置需要通過設置時間和切換控制提供功率晶體管保護,從而確保底部晶體管打開之前關掉頂部晶體管。
c.反饋元件/控制。設計師應在所有伺服控制系統中設置一些“反饋元件”。例如光學傳感器、霍爾效應傳感器、轉速計及最簡單的“EMF 傳感”。各種反饋方法都非常有用,主要取決于所需精確度及所需 RPM 和扭矩。許多消費者電器通常使用反電動勢傳感的無傳感器技術。
d.模擬數字轉換器 在許多情況下,需要設置模擬數字裝置,以將模擬信號轉換為數字信號,從而將數字信號發送至系統 MCU。
e.MCU. 所有閉環控制系統(BLDC 電機幾乎一直屬于此群組)均需要 MCU,以實現伺服回路控制、計算、糾正、PID 控制機傳感器管理。這些數字控制器通常為 16 位,但是復雜性較低的應用可使用 8 位控制器。
f.模擬功率/調節器/基準 除了上述組件以外,許多系統還包括輔助電源、電壓轉換及其他模擬設備,如管理器、LDO、直流/直流及運算放大器。
 三相無刷直流電機的基本操作原理
三相無刷直流電機的基本操作原理

無刷直流(BLDC) 電機為同步電機,轉子和線圈繞組中設有永久磁鐵。它們可在電機定子上產生電磁(參見圖 5)。電氣端子直接連接至定子繞組;因此,轉子上未連接刷子或機械裝置(如有刷電機)。BLDC 電機使用直流電源和開關電路,在定子繞組上產生雙向電流。開關電路必須在每個繞組中使用一個高端開關和低端開關,因此一個 BLDC 電機共使用 6 個開關。
現代電機設計采用固態開關,如MOSFET 或 IGBT,這取決于與繼電器相比時電機的速率和電壓。此外,還必須考慮成本、可靠性和尺寸(參見圖 2)。開關電流產生適當的磁場極性,可吸引相反極性,排斥相同極性。從而產生磁力,促使轉子旋轉。將永久磁鐵用于轉子可為設計師提供機械利益;并可減小尺寸,降低重量。與有刷電機和感應電機相比,BLDC電機的熱特性更優,因而成為掀起機械系統節能新浪潮的理想選擇。
BLDC 通常使用三個相位(繞組),每個相位具有120度的導通間隔(參見圖 3)。
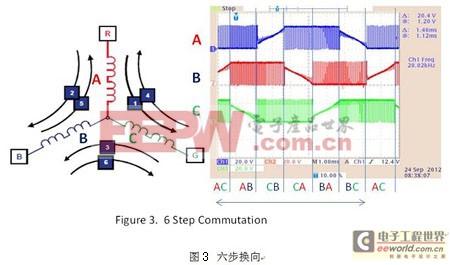
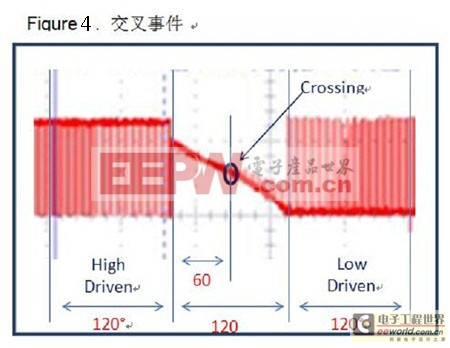
由于為雙向電流,每個相位按照每個導通間隔有兩個步驟。這是一種鍍錫六步換向。例如,換向相序可為 AB-AC-BC-BA-CA-CB。每個導電階段標記一個步驟,任何時候只能由兩個繞組導通電流,第三個繞組懸空。未勵磁繞組可用作反饋控制,構成無傳感器控制算法特征的基礎。為了保持在轉子之前的定子內部的磁場,并產生最佳扭矩,必須在精確的轉子位置完成從一個扇形區到另一個的過渡。通過每 60 度轉向的開關電路獲得最大扭矩。所有開關控制算法均包含在 MCU 中。微控制器可通過 MOSFET 驅動器控制開關電路。MOSFET 驅動器包含適當響應時間(如維持延遲及上升和下降時間)和驅動能力(包括轉換 MOSFET / IGBT “開”或“關”狀態所需的門驅動電壓和電流同步)。
轉子位置對于確定電機繞組換向所需的正確力矩非常重要。在精度要求較高的應用中,可使用霍爾傳感器或轉速計計算轉子的位置速度和轉矩。在首要考慮成本的應用中,逆電動勢 (EMF) 可用于計算位置、速度和轉矩。

pid控制相關文章:pid控制原理
adc相關文章:adc是什么
霍爾傳感器相關文章:霍爾傳感器工作原理
pid控制器相關文章:pid控制器原理
晶體管相關文章:晶體管工作原理
霍爾傳感器相關文章:霍爾傳感器原理 晶體管相關文章:晶體管原理




評論