基于ARM和DSP的地震加速度信號處理系統

3 信號處理的硬件實現
信號處理子系統的原理框圖如圖3所示。
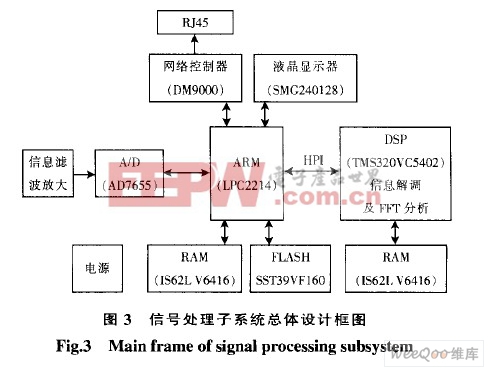
以ARM(選用飛利浦公司的LPC2214)和DSP(Ti公司的TMS320VC5402)為核心,外擴信號調理、A/D采集、網絡控制及液晶顯示模塊。以ARM作為系統控制中心,控制A/D轉換器進行地震加速度已調信號的采集,經DSP的HPI接口將數據存儲到DSP內部RAM 中。完成解調信號的網絡傳輸控制、實時顯示以及TMS320VC5402的HPI引導裝載。而DSP主要進行信號運算,完成解調和FFT頻譜分析。
LPC2214控制器片內有16 kbits RAM和256 kbitsFLASHl 31.為了便于系統升級,擴展了128 kbits的外部RAM 和2 Mbits的外部FLASH.由于DSP要對大量的數據進行運算,而內部RAM 空間有限且還要用于存放上電復位后的boot loader程序,所以擴展128 kbits外部RAM.
LPC2214有bank。 bank 4個外部存儲器組,而對于圖3中的系統設計,ARM擴展的存儲器或外部I/O器件有6個。所以利用片選信號CS3、地址線A23、A22、A21和一片138譯碼器進行地址空間細分,此片外存儲器或I/O 器件屬于bank,組, 所用地址為0x83000000~0x83ffffff。
3.1 信號調理及A,D采集電路
信號調理最主要目的是為了去除信號中的噪聲,使被測電壓范圍和AD采樣范圍相匹配以提高采樣精度。本系統選用Anolog Device公司的ADA4861—3專用放大芯片。該芯片集成了3路放大器。采用單5 V供電。通過調節外接電阻的阻值可以獲得1~1 900的放大增益,輸出具有良好的線性度和溫度穩定性。由于放大電路集成在芯片中。故減少了噪聲的引入。
選擇MD芯片主要考慮的性能指標有分辨率、轉換速率、輸入通道數、信噪比、輸出接口等參數。因為所采集的加速度信號頻率在1 kHz以內根據奈圭斯特定理采樣頻率 >2 kHz就能無失真地恢復原信號,輸入信號有3路,綜合考慮以上因素本系統選用Anolog Device公司生產的AD7655芯片。該芯片支持4路輸入(INA1、INA2、INB。、INB2),轉換位數達16位,1MSPS的轉換速率,單電源+5 V供電,串/并口輸出方式,雙通道同步采樣。采樣由A。引腳電平控制,A0=0,INA1/INB1采樣同步;A o=1,INA~NB2采樣同步問。參考電壓 面接2.5 V,分辨率為2×VREF/655 36,約為76-3 V.
3.2 ARM 和DSP的接口電路
ARM 和DSP通過HPI接口進行連接。ARM先向DSP寫入控制字,設置工作模式,然后將訪問地址寫入地址寄存器(HPIA),再對數據鎖存器(HPID)進行讀寫,即可讀出和寫入指定的存儲單元。主機由兩根地址線A 、A 可以尋址到HPI接口的控制寄存器、地址寄存器和數據寄存器[51;由HBIL、HCNTL1、HCNTL0區分16位數據的高、低字節。當向HBIL=0的地址寫入數據時,表示是第1個字節,向HBIL=I的地址寫入數據表示第2個字節。并且在數據交互之前要設置控制寄存器中的BOB位,指示高地址在前還是低地址在前。這一步在程序初始化時由ARM來完成。DSP的片選信號接主機的nCS2,地址空間屬bankz組,即0)【82000000~0x82眥DSP可以通過HINT向主機發出中斷信號,通知主機一幀數據處理完畢。主機收到中斷信號后讀取約定的DSP內部數據空間中的數據進行顯示或網絡傳輸等處理操作。
DSP的引導裝載采用HPI方式,中斷2信號用于激活HPI自舉模式。有兩種方式可以用來獲取中斷2引腳上的輸入信號:①將主機中斷HINT與INT2直接相連:②在捕捉到DSP復位向量后的30個時鐘周期內觸發一個有效的外部中斷INT2.由于本設計HINT信號用于向主機產生中斷信號,所以HPI自舉加載采用方式②。注意到在自舉加載的開始,HINT引腳會產生一個有效的中斷信號,所以ARM在初始化時要清除這個中斷。
3.3 ARM 和DM9Ooo網絡控制接口
DM90OOE是Davicom公司生產的以太MAC控制器。支持10/100 Mbps傳輸速率。電路使用16位總線方式進行控制。即數據總線D。~D。與芯片的SD。~SD。連接,地址線也進行相對應的連接,片選線與芯片的AEN相連。DM9000E 以太網控制器的基地址為Ox300。而總線的地址線A 與芯片的命令/數據使能端CMD相連,所以對其進行操作的地址是0x300(地址端口)和0x304(數據端口),而結合ARM 的片選線得到的32位地址為0x83000300 (地址端口)和0x83000304(數據端口)。
4 系統軟件設計
傳統的嵌入式系統軟件設計中,由于廣泛采用單任務順序機制因而編程復雜。同時系統安全性差而導致系統頻繁復位以至無法達到設計目標。本設計在軟件設計中引入tzCOS—II實時操作系統,使程序設計變得非常簡單,將操作系統移植到LPC2214中以提高系統實時性。
首先編寫好與硬件接口的驅動程序。應用層程序以任務為編程對象。任務具有任務堆棧、優先級等參數,根據任務的執行順序和重要程度可分配不同的優先級;在任務調度過程中可以通過OSTaskSuspend(os PRIO—SELF)、OSTaskResume(task_prio)函數進行任務之間的切換。本系統可分為DSP boot loader、 D采集、讀HPI、寫HPI、網絡傳輸、液晶顯示等6大任務。在主函數中創建任務,設置任務各項參數。主程序流程圖如圖4所示。

干涉儀相關文章:干涉儀原理








評論