基于ARM與MEMS的AHRS設計

目前MEMS傳感器在消費類電子產品中得到廣泛應用,但是MEMS角速率陀螺儀存在嚴重的零點漂移和隨機誤差,在捷聯慣性導航解算中會產生積分誤差,難以達到應用的精度。加速度計和磁場計能分別測量出重力加速度和地磁場這兩個不相關的三維矢量,可以作為平臺姿態的觀測矢量來校準陀螺儀。擴展卡爾曼濾波可以結合這幾種傳感器的特點,以陀螺儀測量得到的角速率作預測更新,以重力加速度和磁場觀測更新,得到更高精度的姿態角信息。
1 硬件結構
MEMS器件的AHRS硬件基本組成為三軸角速率陀螺儀、三軸加速度計、三軸磁阻傳感器和STM32系列微處理器STM32F103U8T6。航向姿態參考系統的硬件結構如圖1所示。
IMU采用整合了16位的三軸陀螺儀和三軸加速度計的MPU6000,與多組件方案相比,有效避免了組合陀螺儀與加速器時之軸間安裝誤差的問題,節省了安裝空間。同時,內部自帶了16位A/D轉換器,簡化了電路設計。MPU6000的角速率量程為±250 °/s、±500 °/s、±1000 °/s與±2000 °/s。加速度測量范圍為±2g、±4g、±8g與±16g。內部自帶16位的數字溫度傳感器,方便對傳感器進行溫度補償。數據可通過最高可達400 kHz的I2C總線或最高可達20 MHz的SPI接口傳輸,采樣更新速率達到8 kHz,可保證系統測量的實時性。
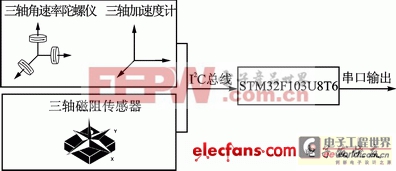
圖1 航向姿態參考系統的硬件結構
霍尼韋爾HMC5883為三軸12位I2C總線數字量輸出磁阻傳感器,測量范圍為±1~±8 Gs,數據更新速率為80 Hz。內置OFFSET/SET/RESET電路,不會出現磁飽和與累加誤差現象,支持自動校準程序,簡化使用步驟,可以滿足地磁場的測量要求。選用基于CortexM3內核的STM32系列ARM處理器STM32F103U8T6,主頻達72 MHz,1.25 DMIPS/MHz;具有硬件單周期乘法器,保證姿態更新的實時性;具有豐富外設接口,可采用I2C總線接口從傳感器中讀取數據,通過串口與上位機進行通信。
2 四維擴展卡爾曼濾波算法
擴展卡爾曼濾波算法(Extended Kalman Filter, EKF)是一套由計算機實現的實時遞推算法,所處理的對象是隨機信號,利用系統噪聲和觀測噪聲的統計特性,以系統的觀測量作為濾波器的輸入,以所要求的估計值(系統的狀態變量)作為濾波器的輸出,濾波器的輸入和輸出由時間更新和觀測更新算法聯系在一起,根據系統的狀態方程和觀測方程估算出所需要處理的信號。AHRS擴展卡爾曼濾波算法的狀態變量采用四維四元數,與采用歐拉角相比,避免了采用歐拉角計算時涉及的大量三角函數運算,保證了更新速率和實時性,同時不存在采用歐拉角運算出現的奇異性。歐拉角與四元數的轉換關系如式(1)~(3)所示。
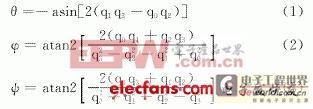
四元數微分方程如式(4)所示,









評論