人形機器人直立行走工作原理

為何人形機器人難以維持直立行走姿態?
在科技飛速發展的今天,人形機器人已逐漸融入我們的生活。無論是家庭服務、工業制造,還是娛樂表演,它們都發揮著不可或缺的作用。但你是否曾困惑:為何這些外觀高度仿人的機器人,在行走時卻難以保持穩定的直立姿態呢?
首先,我們來深入了解人形機器人的結構和運動特性。人形機器人,主要由頭部、軀干、四肢及關節構成,依賴電機和減速器實現動作。在行走時,它們需通過關節的旋轉來維持平衡。然而,這一過程并不總是那么順暢。
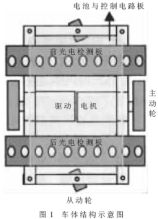
1. 機械結構與驅動系統
人形機器人直立行走的基礎是仿生機械結構,通常由以下部分組成:
關節與自由度 :機器人的腿部、髖部、膝部和踝部通常設計為多自由度(DoF)關節,模仿人類關節的靈活性。例如,髖關節需要實現前后擺動(矢狀面)和左右旋轉(冠狀面)。
驅動方式 :關節通過電機(如伺服電機、諧波驅動電機)、液壓或氣動裝置驅動。現代機器人多采用高精度、高扭矩的電機配合減速器(如諧波減速器)來實現精確控制。
輕量化材料:使用碳纖維、鋁合金等材料降低重量,同時保證結構強度。
人形機器人的結構相當復雜,包含眾多關節,這無疑增加了運動時的摩擦與阻力。特別是在關節處,摩擦問題尤為突出,使得機器人在行走時難以保持筆直的姿態。此外,機器人的重量分布也至關重要,不平衡的重量分布會導致行走過程中的傾斜。
機械結構與驅動系統的核心難點
1.關節自由度與穩定性的矛盾
靈活性與平衡的權衡 :多自由度關節(如髖關節3自由度、踝關節2自由度)雖能模仿人類動作,但自由度數增加會導致:
控制維度指數級增長 :6條腿的蜘蛛機器人僅需18個自由度,而雙足人形機器人(如ASIMO)需26+自由度,控制算法復雜度陡增。
動態穩定性下降:多關節聯動易引發耦合振動(如邁步時軀干擺動干擾髖關節角度)。
仿生關節的物理限制:
人類關節的柔性無法完全復制:例如膝關節的半月板緩沖、踝關節的肌腱彈性,剛性機械結構難以實現類似“柔性觸地”效果,易導致沖擊力傳遞至機身。
2.驅動系統的性能瓶頸
功率密度與體積的矛盾
電機+減速器的局限性 :諧波減速器雖精度高,但扭矩密度(如HD諧波減速器約50 N·m/kg)仍遠低于人類肌肉(約300 N·m/kg)。波士頓動力Atlas改用液壓驅動(動力密度提升3倍),但帶來噪音和漏油風險。
能耗問題 :雙足行走的比能耗(單位質量移動單位距離的能耗)是輪式機器人的10倍以上,電機效率需達到90%以上(目前高端伺服電機約85-92%)。
動態響應速度:
快速步態(如跑步)要求驅動系統毫秒級響應,但電機轉子慣量、減速器背隙會導致延遲。例如,MIT Cheetah 3通過低慣量直驅電機(無減速器)實現1kHz控制頻率,但犧牲了扭矩輸出。
3. 輕量化與結構強度的沖突
材料選擇的極限
碳纖維的挑戰:雖比強度(強度/密度)是鋼的5倍,但各向異性導致關節連接處易分層,且無法焊接(需膠接或螺栓,增加重量)。
3D打印金屬結構的缺陷:拓撲優化可減重30%,但疲勞強度僅為鍛造件的70%(如踝關節反復承受2倍體重的沖擊力時易斷裂)。
動態負載下的形變 :
例如本田ASIMO的鋁合金腿部在急停時產生微米級形變,導致IMU數據與真實姿態偏差,需通過力傳感器反饋補償。
4.環境適應性的實現難點
足底接觸動力學
非結構化地形的力控 :在沙地或雪地中,足底接觸面積和摩擦力動態變化,傳統位置控制失效,需力控(如MIT的阻抗控制算法),但力傳感器噪聲(±2% FS)會導致步態抖動。
沖擊吸收機制:人類足弓的彈性儲能效率達60%,而機器人彈簧-阻尼系統(如Atlas的串聯彈性驅動器)僅能實現40%,且增加機械復雜度。
5.系統集成與熱管理
驅動單元的熱積累:
伺服電機持續工作溫度可達80°C,若腿部密閉空間散熱不良(如豐田T-HR3的關節模組),會導致磁鋼退磁(釹鐵硼磁體居里溫度310°C,但80°C時磁通量下降5%)。
布線難題:
多自由度需數百根線纜(電源、編碼器、力傳感器),線束重量占腿部總重15%(如Unitree H1),且反復彎折易斷裂(需柔性電路板,成本增加10倍)。
2. 傳感器系統
機器人需要實時感知自身姿態和環境信息,主要依賴以下傳感器:
慣性測量單元(IMU) :包含陀螺儀和加速度計,用于檢測機器人的傾斜角、角速度和加速度,是維持平衡的核心傳感器。
IMU(慣性測量單元)是人形機器人實現姿態感知和平衡控制的核心傳感器,但其在實際應用中存在多方面的局限性,這些限制直接影響機器人的運動穩定性和環境適應性。以下是詳細分析:
a、噪聲與漂移:積分誤差的累積
短期噪聲 :IMU中的陀螺儀和加速度計存在白噪聲(如MEMS陀螺噪聲密度約0.005°/s/√Hz),導致姿態解算(如四元數積分)時角度誤差隨時間累積。例如,僅依賴IMU的航向角在10秒后可能漂移2-3度。
長期漂移(Bias Instability) :溫度變化或器件老化導致零偏漂移(如消費級MEMS陀螺零偏穩定性約10°/h),長時間運行后位置誤差呈二次方增長。例如,僅用IMU推算位置時,1分鐘后定位誤差可達數米。
解決方案 :需融合視覺(如VIO)、編碼器或地面接觸力數據,通過卡爾曼濾波(EKF)或互補濾波抑制漂移。
b、對外部干擾不敏感
無法感知接觸力 :IMU僅測量本體加速度和角速度,無法直接獲取足底與地面的相互作用力(如打滑、沖擊力分布)。例如,在冰面上行走時,IMU無法檢測到足底滑動,導致步態控制失效。
外力干擾的誤判 :若機器人被外力推動(如被人推搡),IMU會將其誤認為自身運動,導致控制算法生成錯誤的反向力矩而摔倒。
解決方案 :需結合足底力傳感器(如六維力傳感器)或關節力矩反饋,區分內/外部加速度。
c、動態運動中的高頻振動干擾
機械振動耦合 :腿部快速擺動或關節電機高頻啟停會引發機械振動(如10-100Hz),IMU可能將這些高頻噪聲誤判為姿態變化。例如,波士頓動力Atlas在跳躍落地時,機身振動導致IMU短時輸出異常角速度。
傳感器帶寬限制 :多數IMU帶寬為100-500Hz,無法有效濾除更高頻振動(如電機諧波干擾)。若直接使用原始數據,可能導致控制環震蕩。
解決方案 :硬件層面增加機械阻尼(如橡膠隔振墊);算法層面采用低通濾波或小波降噪。
力/力矩傳感器:安裝在足底或關節處,測量與地面的接觸力和壓力分布,用于調整步態。
視覺傳感器:攝像頭或激光雷達(LiDAR)用于環境感知(如障礙物識別、路徑規劃)。
編碼器:安裝在關節電機上,反饋關節角度和運動狀態。
3. 控制算法
直立行走的核心是控制算法,需實現動態平衡、步態規劃和實時調整:
(1)平衡控制
零力矩點(ZMP)理論 :通過計算機器人重心投影與地面接觸區域的相對位置,確保機器人動態平衡。當重心投影在支撐多邊形(如單腳或雙腳觸地區域)內時,機器人不會傾倒。
倒立擺模型:將機器人簡化為倒立擺,通過調整支撐腿和擺動腿的力矩來維持平衡。
模型預測控制(MPC):預測未來幾步的運動狀態,優化關節力矩和步態軌跡。
(2)步態生成
周期性步態規劃:生成行走、跑步等周期性動作的軌跡(如腿部擺動軌跡)。
環境適應性步態:根據地形變化(如斜坡、不平地面)實時調整步態。
(3)分層控制架構
高層控制:規劃整體運動(如行走方向、速度)。
中層控制:生成關節軌跡和力矩指令。
底層控制:執行電機力矩的閉環控制。
從機器人控制的角度分析,膝蓋的適度彎曲對于保證機器人的姿態可控性至關重要。這是因為,在某些姿態下,如膝關節伸直或兩關節同軸等情況,機器人的可控性會受到嚴重影響。為了避免這些棘手情況,控制系統需要采取額外的預防措施,以確保數值計算的穩定性。
膝蓋彎曲在行走過程中的好處在于,它為機器人提供了更多的調整空間。當上身因地形起伏或其他擾動而晃動時,腿部可以通過調整膝關節的彎曲程度來補償這種擾動。換句話說,彎腿走路為機器人提供了一種靈活的調整機制,從而有助于維持穩定的直立姿態。
人形機器人在行走時,能量消耗巨大。這與人體步態的節能特性形成了鮮明對比。人體步態在行走過程中呈現出一種不完全穩定的節能模式,仿佛是在不斷利用棍子般的支撐力將身體向前推動,同時通過撤掉后方的支撐來保持動態平衡。這種步態使得大部分體重得以沿腿部軸線方向導入地面,從而有效降低了行走時的能量消耗。
然而,人形機器人在模擬這種步態時卻面臨諸多挑戰。直腿走路的步態設計,雖然在一定程度上簡化了機器人的運動學模型,但卻犧牲了行走過程中的穩定性。當一條腿伸直支撐身體時,由于關節驅動力矩的缺失,身體在受到擾動時容易失去平衡。此外,直腿落地時的傳力方向受限,需要精心計算落地點以確保穩定,否則就可能導致摔倒。
相比之下,彎腿走路則提供了更大的調整空間。通過彎曲膝關節,機器人可以靈活地調節落地腿對身體的力的大小和方向,從而更好地維持平衡。這也是為什么人在初次嘗試走易滑的冰面時,會下意識地屈膝以保持穩定,而不是直愣愣地伸直腿踩上去。

在控制方面,人形機器人已經取得了顯著的進展,能夠在一定程度上進行姿態調整,從而有助于穩定上半身姿態和步態。然而,非仿人步態的設計仍可能導致高能耗和笨重的驅動關節,這在一定程度上限制了機器人的靈活性和效率。同時,傳感器性能的不足也可能影響機器人的步態穩定性和能量效率。因此,在未來的研究中,我們需要進一步探索更節能、更穩定的步態設計方法,并提升相關傳感器的性能以優化機器人的運動表現。
為了實現人形機器人的精確運動控制,傳感器技術發揮著至關重要的作用。市場上的人形機器人普遍配備了激光雷達、攝像頭、陀螺儀和加速度計等傳感器,以獲取環境信息。然而,這些傳感器的性能在復雜環境中仍存在局限性,難以全面捕捉環境變化。特別是在光線條件差異顯著或地面存在雜物時,傳感器可能因誤判而影響機器人對自身位置和姿態的準確判斷,進而導致站立穩定性受損。
總結
人形機器人直立行走的核心理念是仿生設計 + 實時反饋控制 。通過傳感器獲取姿態和環境信息,結合先進算法實時調整關節力矩和步態,最終實現動態平衡和靈活運動。隨著人工智能(如強化學習)和材料技術的進步,未來人形機器人將更接近人類的運動能力。
隨著人工智能技術的不斷進步,深度學習、強化學習等先進算法已被逐步引入人形機器人領域。這些算法的加入,使得機器人能夠更深入地理解并適應周圍環境的變化,進而實現更為穩定、自然的行走姿態。
然而,將這些高級算法真正應用到實際問題中仍面臨諸多挑戰,諸如數據量不足、算法復雜度高等難題。因此,如何將這些前沿算法與現有的運動控制方法有效融合,以提升人形機器人的穩定性和行走性能,已成為一個亟待解決的難題。綜上所述,人形機器人無法直立的現象是多種因素共同作用的結果。未來,我們需持續優化機械結構、運動控制算法以及傳感器性能等多方面技術,并借助人工智能的力量,共同推動機器人穩定性和行走性能的提升。






評論